Kap 9 Asynkrone kortslutningsmotorer
Trefase asynkrone kortslutningsmotorer
Trefase asynkrone kortslutningsmotorer
- Dominerer markedet fullstendig.
- Stort utvalg i standard motorer.
- Meget robust.
- Billig i anskaffelse.
- Trenger lite ettersyn.
- Rikt og lett tilgjengelig på reservedeler.
- Demontering og montering når det er snakk om overhalling er meget enkelt.
For å gjøre et riktig valg av motor til en passende last må det tas hensyn til følgende:
- arbeidsbelastning (ytelse} - driftstype
- koblingssyklus - start/bremse- og omkoblingsforløp.
- tilleggstreghetsmoment - momentforløpet til arbeidsmaskinen –
- turtallsstyring – nettforhold.

Bildet er hentet fra LØNNE motorkatalog.
Vekselstrømsmotorer deles inn i tre hovedgrupper:
-
ASYNKRONMOTORER
- kortslutningsmotorer
- sleperingsmotorer
-
SYNKRONMOTORER
- KOMMUTATORMOTORER
Kortslutningsmotorens oppbygging og virkemåte. Kortslutningsmotoren har en primær og en sekundær del. Primær delen kalles stator og er den stillestående delen. Sekundær delen kalles rotor og er den roterende delen.
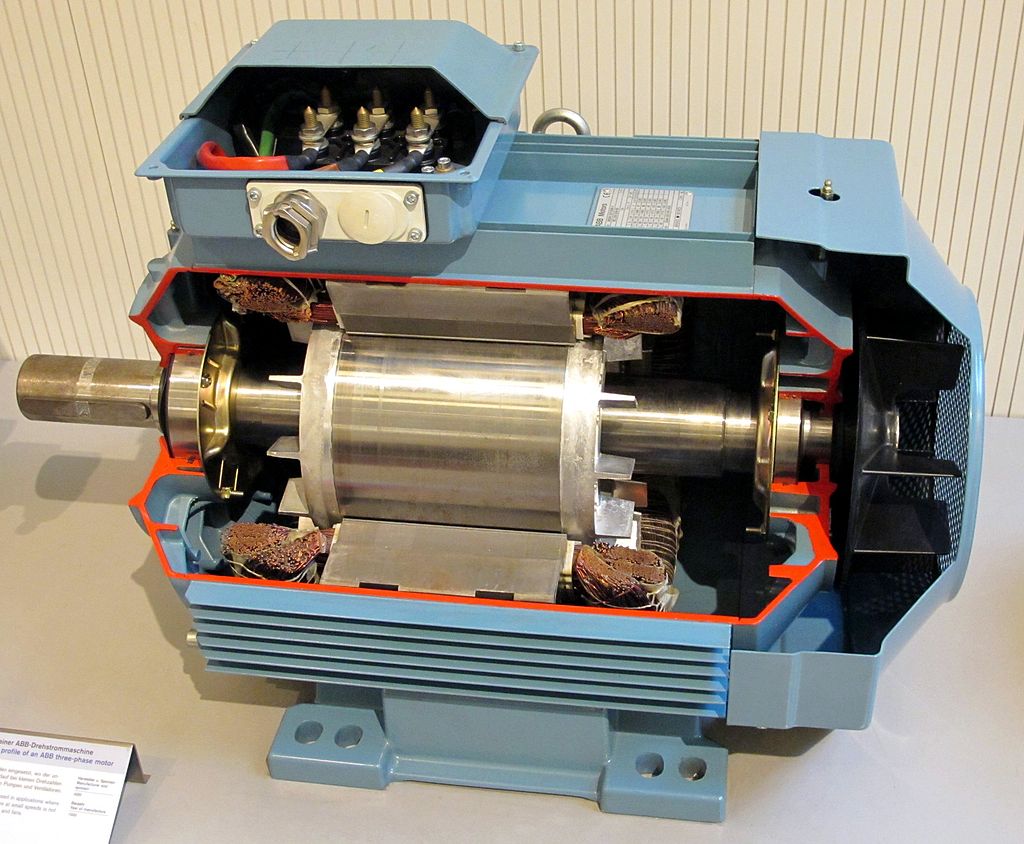
Stator
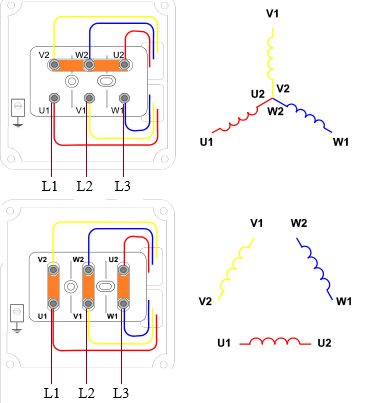
Statoren består av tynne jernblikkplater som er stanset ut med spor til viklingene. Jernblikkplatene er isolasjonslakkerte og presset sammen slik at de danner statorkransen. De tre statorviklingene er plassert i statorsporene. De seks viklingsendene er ført frem til klemmebrettet til motoren, hvor koblingen utføres enten i stjerne eller i trekant avhengig av nettspenningen.
Vikling nr.1 er merket med U1 og U2
Vikling nr.2 er merket med V1 og V2
Vikling nr.3 er merket med W1 og W2
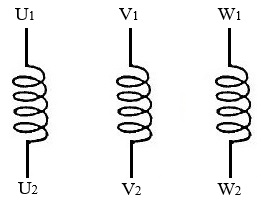
Dette vil igjen si at hver vikling har en begynnelse og en endelse, og hvor den bokstaven med den laveste indeksen (1) er begynnelses enden.
Skal f.eks. motoren kobles i stjerne så skal U1-V1-W1 tilkobles nettet mens de andre endene skal sammenkobles til et stjernepunkt.
Til sjøs er det ofte slik at motorer må sendes på land for omvikling, når de kommer tilbake så er alle seks viklingsendene løse. Elektrikeren må da måle ut hver vikling og merke disse, men han vet da ikke hva som er begynnelsen på viklingen og slutten på viklingen. Skal man være så uheldig å få snudd den ene viklingen i forhold til de to andre så vil den som er snudd jobbe mot de to andre. Motoren vil da ha et lavere turtall og den vil gi fra seg en brummende lyd som er lett å høre. Fremgangsmåten for å løse problemet er at man må bytte om viklingsenden for en og en vikling til man har oppnådd korrekt turtall i tomgang.
Ombyttingen av viklingsendene gjøres da på klemmebrettet til motoren. For å snu dreieretningen til en kortslutningsmotor så bytter to av tilledningene plass, og det er likegyldig hvem av de tre som bytter. Tilledningene er merket Ll-L2-L3 og det vil si at spenningen i L1 kommer først inn til motoren, 120 elektriske grader etterpå kommer spenningen i L2, og så 120 elektriske grader etter L2 kommer spenningen i L3.
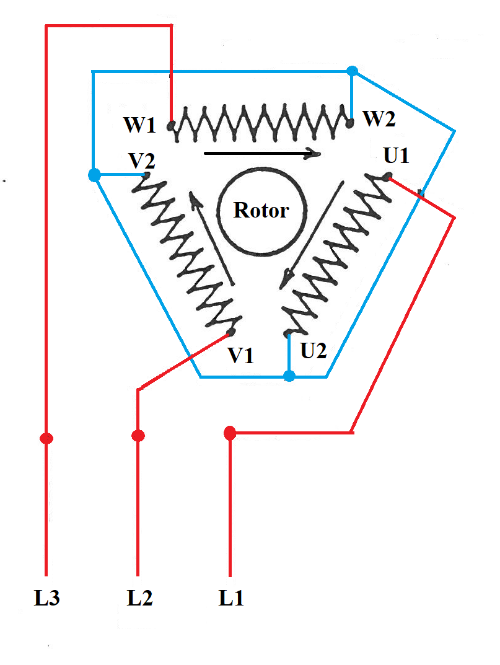
Stjernepunktet binder sammen U2-V2-W2
Av figuren ser vi at det er nødvendig og ha tre viklinger for å få til et roterende dreiefelt. Ved brudd i en av til førselsledningene så vil motoren oppføre seg som om den var tilkoblet enfasa anlegg. Motoren vil nå ikke få noe dreiefelt og den kommer ikke i gang av seg selv. Ved å dytte den i gang vil den gå i den retningen den blir tvunget til å gå i. Før den får det lille puffet så står rotoren og vibrerer, den får ikke bestemt seg hvilken vei den skal gå.
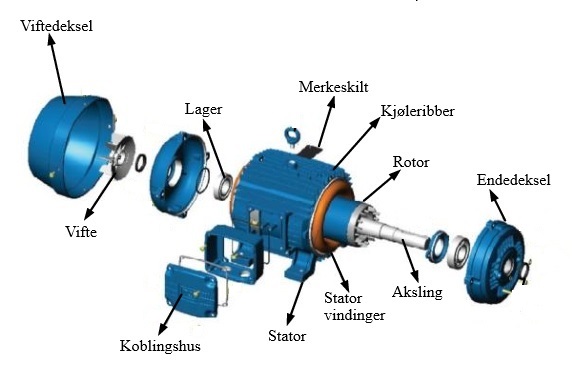
Kortslutningsrotoren
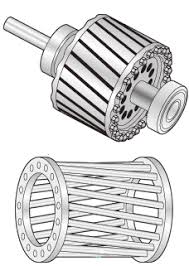
Rotoren i en kortslutningsmotor består hovedsakelig av tre deler:
- rotorakslingen
- lamellert blikk med spor
- rotorlederene
Rotorlederene som består av kobber eller aluminium blir lagt i
sporene uten isolasjon, og de er kortsluttet i begge ender,
derav navnet kortslutningsrotor. Tar man og setter sammen
rotorstaver og kortslutningsringene så ser dette ut som bur derav
navnet burvikling.
Virkemåte
Virkemåte
Statorviklingene får tilført en trefaset vekselstrøm og dette vil medføre at hver av de tre faseviklingene frembringer et magnetisk vekselfelt. Disse tre feltene setter seg sammen til et resulterende statorfelt dvs. et dreiefelt som noterer synkront med en hastighet som er bestemt av nettfrekvensen og antall polpar.
FORMEL: ns = $\frac{f * \ 60}{p}$ (o/min)
ns = synkrone turtall
f = nettfrekvensen
p = antall polpar
Det roterende magnetfeltet vil spre seg inn i rotor, og det vil bli indusert en strøm og spenning i rotor med en bestemt rotorfrekvens.
Når rotoren står stille som den gjør i startøyeblikket vil den relative hastigheten mellom statorfelt og rotor være størst.
Det blir indusert en strøm og spenning i rotoren som er forårsaket av magnetfeltet fra stator og disse vil veksle med en frekvens som vi kaller rotorfrekvensen
fr = fnett * s s = sakking
I startøyeblikket er rotorfrekvensen lik nettfrekvensen, og vi har da de største feltlinjeoverskjæringene på rotoren, og dette medfører at motor trekker den største strømmen i start øyeblikket. Etter hvert som turtallet til rotoren øke så vil strømmen synke. Se fig. nedenfor
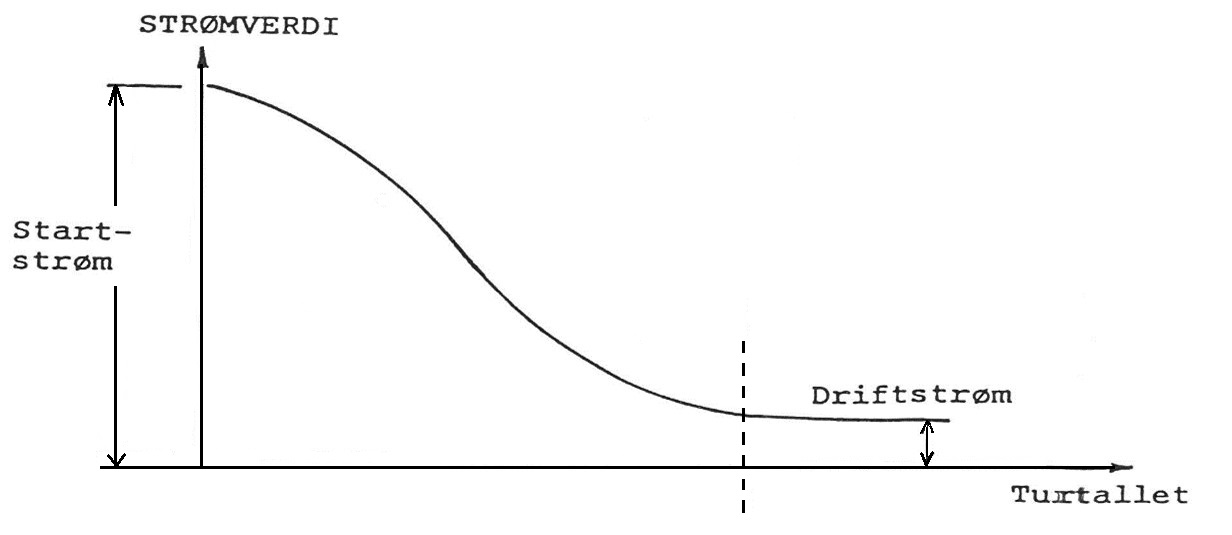
Av figurenover ser vi at strømmen synker til driftstrømsverdien, når turtallet har stabilisert seg. Ved økende hastighet på rotor så vil altså strøm, spenning og frekvens i rotor avta til små verdier. Rotorfrekvensen er ved motorens merke effekt meget lav ca. 0,05 Hz. Hadde rotorhastigheten og det synkrone dreiefeltet fra stator vert lik hverandre så ville vi ikke fått noen kraft linjeoverskjæringer på rotorstavene, og dermed ingen strøm i rotor. Dette ville medføre til at det ikke blir indusert noe magnetfelt fra rotor som kan henge seg på statordreiefeltet. Dermed mister motoren sitt moment. Derfor må statordreiefeltet ha en større hastighet enn rotorturtallet.
Det at rotor har et lavere turtall enn dreiefeltet gjør at rotoren går asynkront i forhold til dreiefeltet, derav navnet asynkronmotor.
Sakking
Ved tomgang er forskjellen mellom rotor hastighet og stator dreiefeltet meget liten, mens den ved merkelast er større.
Forskjellen mellom disse to hastighetene kalles for sakking eller slipp, og den oppgis som regel i prosent.
S = $\frac{\text{ns} - n}{\text{ns}}$ n = ns • (1 -\ s)
ns = det synkrone turtall til statordreiefeltet
n = det asynkrone turtallet til rotoren
s = sakking eller slipp (brukes som en faktor mindre enn 1 i ligningene)
Skal sakkingen oppgis i prosent så skal faktoren multipliseres med 100.
Små motorer har en sakking ved full belastning på ca. 5 - 8 %.
Større motorer har en sakking ved full belastning på ca. 3 %.
Sakking i prosent: s = $\frac{ns\ - n}{\text{ns}}$ • 100 %
Oppsummering om hovedprinsippene bak en asynkron kortslutningsmotor
Oppsummering om hovedprinsippene bak en asynkron kortslutningsmotor
En asynkron kortslutningsmotor, også kjent som en asynkronmotor med kortsluttet rotor eller induksjonsmotor, fungerer ved å omdanne elektrisk energi til mekanisk energi ved hjelp av elektromagnetisk induksjon.
Statorens magnetfelt.
- Motoren drives av vekselstrøm (AC) som føres inn i statorviklingene.
- Statoren har flere viklinger plassert i et bestemt mønster, som skaper et roterende magnetfelt når strømmen går gjennom.
- Magnetfeltet roterer med en hastighet kalt synkron hastighet (nₛ), bestemt av strømfrekvensen og antall poler i motoren:
$n_{s} = \frac{f * 60}{p}$
hvor f er frekvensen (Hz) og p er antall polpar.
Induksjon av strøm i rotoren.
- Rotoren består av et kortsluttet bur laget av kobber eller aluminium.
- Når statorens magnetfelt roterer, vil det indusere en strøm i rotorens ledere gjennom elektromagnetisk induksjon (Faradays lov).
- Ifølge Lenz' lov vil den induserte strømmen i rotoren forsøke å motvirke årsaken til seg selv – altså forskjellen i hastighet mellom statorfeltet og rotoren.
Rotorens bevegelse (asynkron drift).
- For at det skal induseres strøm i rotoren, må det være en hastighetsforskjell mellom statorfeltet og rotoren – dette kalles slip (s).
- Slip defineres som:
$s = \frac{n_{s} - n}{n_{s}} * 100\ \%$
hvor n er rotorens hastighet.
- Hvis rotoren roterte med nøyaktig samme hastighet som magnetfeltet (nₛ), ville det ikke vært noen relativ bevegelse, og dermed ingen indusert strøm.
- Derfor roterer rotoren alltid litt saktere enn det synkrone feltet (derav navnet asynkron motor).
Moment og effekt.
- Den induserte strømmen i rotoren skaper sitt eget magnetfelt, som igjen samvirker med statorfeltet og danner et dreiemoment.
- Jo høyere belastning motoren har, desto større slip er nødvendig for å indusere mer strøm og skape høyere dreiemoment.
Fordeler med en asynkron kortslutningsmotor
Fordeler med en asynkron kortslutningsmotor
- Enkel og robust konstruksjon (ingen børster eller sliperinger).
- Lite vedlikehold (sammenlignet med f.eks. en likestrøms motor).
- Høy virkningsgrad og pålitelighet.
- God regulering og enkel start med direkte påkobling til nettspenning eller med mykstarter.
Asynkron kortslutningsmotorer brukes mye på skip, pumper, vifter, transportbånd og mange andre bruksområder på grunn av deres pålitelighet og enkle design.
Vedlikehold av en asynkron kortslutningsmotor
Vedlikehold av en asynkron kortslutningsmotor
Vedlikehold av en asynkron kortslutningsmotor er relativt enkelt sammenlignet med andre typer motorer, spesielt siden den har få bevegelige deler og ingen børster eller sliperinger. Likevel krever den regelmessig tilsyn for å sikre pålitelig drift og lang levetid.
-
Rutinemessig inspeksjon (forebyggende vedlikehold).
- Visuell sjekk: Se etter tegn på overoppheting, misfarging, oljelekkasjer eller mekaniske skader.
- Lytt etter ulyder: Unormale lyder kan indikere lagerslitasje eller ubalanse.
- Vibrasjonskontroll: Overdreven vibrasjon kan være et tegn på ubalanse, feil justering eller løse bolter.
-
Smøring av lagre
- Kontroller lagrene jevnlig for slitasje og overoppheting.
- Smør lagrene i henhold til produsentens anbefalinger, vanligvis med et egnet fett.
- Unngå over- eller undersmøring, da for mye fett kan føre til overoppheting, mens for lite kan gi økt friksjon og slitasje.
-
Rengjøring.
- Fjern støv og skitt fra motorens kjøleribber og ventilasjonsåpninger for å sikre god varmeavledning.
- Sjekk kjøleviften for skader eller blokkeringer.
- Rengjør stator og rotor med trykkluft (hvis tillatt) for å fjerne oppsamlet støv.
-
Elektriske tester.
- Mål isolasjonsmotstanden med en megger for å sjekke viklingenes tilstand. Lav isolasjonsmotstand kan indikere fuktighet eller nedbrutt isolasjon.
- Kontroller viklingsmotstanden for å oppdage eventuelle kortslutninger eller brudd i viklingene.
- Sjekk strømforbruk og spenning for å sikre at motoren opererer innenfor spesifikasjonene.
-
Mekanisk vedlikehold.
- Sjekk koblinger og fundamentbolter for å sikre at motoren er riktig montert og ikke løsner under drift.
- Kontroller aksel og kobling for slitasje eller feiljustering.
-
Overvåking av driftstemperatur.
- Kontroller at motoren ikke blir for varm. Overoppheting kan skyldes overbelastning, dårlig ventilasjon eller elektriske feil.
- Bruk temperaturfølere hvis motoren har slike innebygd for å varsle ved for høy temperatur.
Når bør motoren overhales eller skiftes ut?
Hvis du oppdager følgende problemer, kan det være nødvendig med en grundigere inspeksjon eller overhaling:
- Gjentatte overopphetingsproblemer.
- Vedvarende høy vibrasjon eller ulyder.
- Dårlig isolasjonsmotstand på viklingene.
- Stadig behov for smøring eller lagerbytte.
Regelmessig vedlikehold forhindrer driftsstans, forlenger levetiden og sikrer optimal ytelse for motoren.
Merking av motorer
Merking av motorer
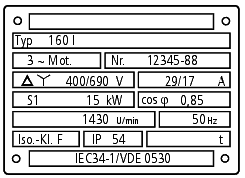
Alle motorer har et merkeskilt som forteller det meste om motoren.
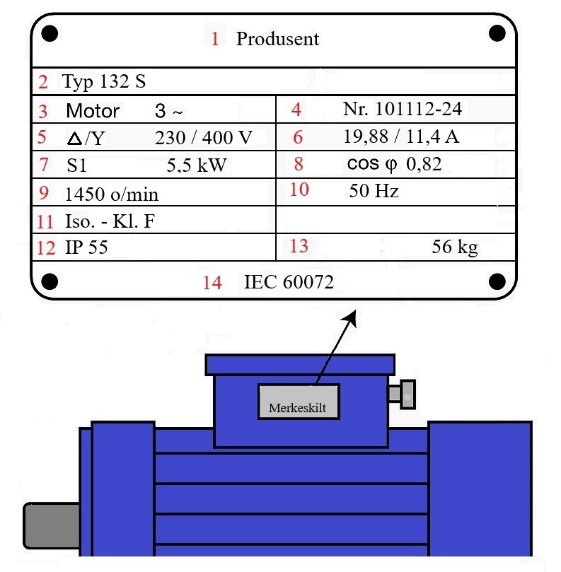
- Produsent, fabrikk.
- Type motor. 132 S står for byggemål.
- 3 fase motor.
- Fabrikk nummer.
- Kobling. Trekant med 230 V og stjerne med 400 V.
- Strømtrekk 19,88 A med en spenning på 230 V og strømtrekk på 11,4 A ved 400 V.
- S1 motor (kontinuerlig drift). Effekt på akslingen er 5,5 kW.
- Effektfaktor (faseforskyvnings vinkel).
- Motoren går med 1450 omdreininger i minuttet. Dette er en 4 polet (2 polpar).
- Motoren går på 50 Hz.
- Isolasjonsklasse F. Sjå NEK 410. Tabellen finn de også senere i kapittelet.
- Tetthetsgrad IP 55. Se neste side.
- Vekt av motoren.
- Standard for utførelse.
IP-klassifisering
IP-klassifisering
Kapslingsklassifisering (IEC 60529) er en standard for vurdering av beskyttelsesnivåer for elektroteknisk utstyr mot inntrenging av vann, støv og utilsiktet berøring.
Klassifiseringen anvender prefikset "IP" (International Protection eller Ingress Protection) etterfulgt av to sifre og, i noen tilfeller, en bokstav. Det første sifferet indikerer nivået av beskyttelse mot faste objekter, inkludert støv og utilsiktet kontakt. Det andre sifferet angir beskyttelsen mot inntrenging av vann. Høyere sifre tilsvarer høyere beskyttelsesnivåer. Eventuelle tilleggsbokstaver beskriver den spesifikke beskyttelsen mot kontakt.
Hvis et produkt mangler en av de beskyttelsene som beskrives av én eller flere av disse klassene, erstattes det aktuelle sifferet av bokstaven "X".
Første siffer
Beskyttelse mot berøring og inntrengende gjenstander
IP0X Ubeskyttet
IP1X Minst 50 mm i diameter
IP2X Minst 12,5 mm i diameter
IP3X Minst 2,5 mm i diameter
IP4X Minst 1 mm i diameter
IP5X Støv beskyttet
IP6X Støvtett
Andre siffer
Beskyttelse mot inntrengende vann. Ikke noe vann får trenge inn i en slik mengde eller på ett slikt sett att tilfredsstillende drift påvirkers eller sikkerheten er truet.
IPX0 Ubeskyttet
IPX1 Beskyttet mot fall (bare vertikale fall)
IPX2 Beskyttet mot fall ved maks 15° vinkel
IPX3 Sprutsikker
IPX4 Sprut tett
IPX5 Spylesikker
IPX6 Spyletett
IPX7 Vanntett (nedsenket i vann)
IPX8 Trykkvanntett (nedsenket i vann)
Tilleggsbokstaver
Personbeskyttelse mot berøring av spenningsførende deler. Dette brukes når den faktiske berøringsbeskyttelsen av spenningsførende deler er bedre enn hva som angis med første siffer.
IPXXA Baksiden av hånden (Ø 50 mm)
IPXXB Finger (Ø 12 mm, lengde 80 mm)
IPXXC Objekter (Ø 2,5 mm, lengde 100 mm)
IPXXD Ledning (Ø 1 mm, lengde 100 mm)
Øvrige standarder.
Utover de tidligere nevnte standardene, så forekommer også den nye normen IP69K, ifølge DIN 40050. Denne kapslingsklassen er først rettet mot laboratoriemiljø, prosess- og næringsmidler. Komponenter som oppfyller IP69K, tåler å skylles med varmt vann under høyt trykk og skal motstå sterke rengjøringsmidler og kjemikalier uten å gi fra seg noen spor.

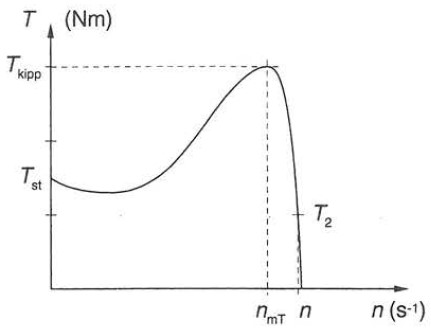
Moment- og omdreiningstalls forhold
Moment- og omdreiningstalls forhold
Det er meget viktig å kjenne til dreiemomentforholdene til en kortslutningsmotor.
Det dreiemomentet som en trefase asynkron kortslutningsmotor utvikler på sin aksel er meget forskjellig i sin størrelse i turtallsområdet fra n = 0 til n = ns
La oss ta det steg for steg og prøve å forklare på en enkel og forståelig måte hvordan moment og omdreiningstall (turtall) henger sammen i en trefase asynkron kortslutningsmotor.
Startmoment
1. Hva er dreiemoment?
Dreiemoment (eller moment) er et mål på rotasjonskraft.
Tenk deg at du bruker en fastnøkkel på en bolt – jo lenger armen på nøkkelen er, eller jo hardere du drar, desto større moment.
Formel
M = T = torsjonsmoment (dreiemoment) $M = T = \frac{P_{a}}{\omega}\frac{P_{a}}{2 * \ \pi * n}$
Vinkelhastigheten er gitt av: $\omega = 2 * \ \pi * n$
Pa = avgitt effekt på akslingen.
n = turtall per sekund.
2. Sammenhengen mellom moment og turtall.
En kortslutningsmotor (asynkronmotor) har et karakteristisk forhold mellom moment og turtall (n). Dette forholdet er ikke lineært.
-
Ved n = 0 (motoren står stille):
Dette kalles startmoment. Motoren trekker da stor strøm, og momentet kan være 1,5–3 ganger merkedreiemomentet. -
Når turtallet øker, øker også den mekaniske effekten, men samtidig reduseres forskjellen mellom synkronturtall og rotorturtall (slip).
- Motoren utvikler maksimalt moment (ofte kalt kippmoment, maksmoment eller pull-out moment) ved en viss belastning før den "glipper".
- Ved n = ns (synkronturtall):
Momentet = 0. Det er fordi slip = 0, og da overføres ingen effekt til rotoren.
3. Moment-turtall-kurve.
Hvis vi tegner en kurve for moment vs. turtall, får vi typisk:
- En bratt økning i moment fra null turtall.
- En topp (kippmoment, maksmoment).
- En gradvis nedgang mot null når turtallet nærmer seg synkronturtall.
4. Hvor kommer momentet fra?
Effekten som utvikles i rotoren, kommer fra indusert strøm som skyldes differansen mellom det roterende magnetfeltet (fra statoren) og rotorens bevegelse.
Denne induserte strømmen i rotoren skaper et eget magnetfelt → som igjen danner en kraft mellom rotor og stator → som gir dreiemoment.
Oppsummert
Oppsummert
- En kortslutningsmotor utvikler ulikt moment avhengig av turtallet.
- Startmomentet er stort, og momentet er på topp ved en viss slip.
- Ved synkronturtall er slip = 0 → ingen rotorstrøm → null moment.
- Moment = tilført effekt / vinkelhastighet.
Kippmoment
Kippmoment (også kalt maksmoment eller pull-out torque på engelsk) er det største dreiemomentet en asynkronmotor kan utvikle før den mister evnen til å holde turtallet oppe under belastning.
Enkelt forklart:
Tenk deg at motoren driver en last, og du gradvis øker belastningen. Momentet som motoren må levere øker. Når du når kippmomentet, er motoren på sitt maksimale – den klarer ikke å levere mer dreiemoment.
Hvis belastningen øker videre, vil motoren begynne å bremse ned og til slutt stoppe.
I moment–turtall-kurven:
- Kippmomentet ligger på toppen av kurven.
- Etter dette punktet faller momentet raskt dersom turtallet synker ytterligere.
Viktig i praksis:
- Dimensjonering: Motoren må velges slik at belastningen aldri overstiger kippmomentet, ellers stopper den.
- Sikkerhetsmargin: Kippmomentet er vanligvis 2,0–3,5 ganger merkemomentet.
Eksempel
Eksempel
En motor har:
- Merkemoment = 25 Nm
- Kippmoment = 75 Nm
Den kan da håndtere en kortvarig belastning opp til 75 Nm. Går belastningen over det, stopper motoren.
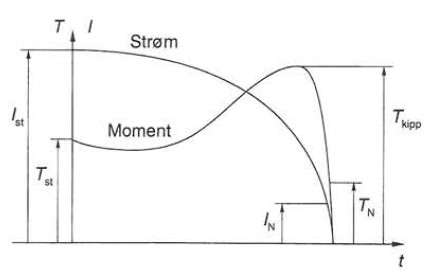
Moment- og startstrømkurver for direkte start.
Direkte start og stjerne - trekant start
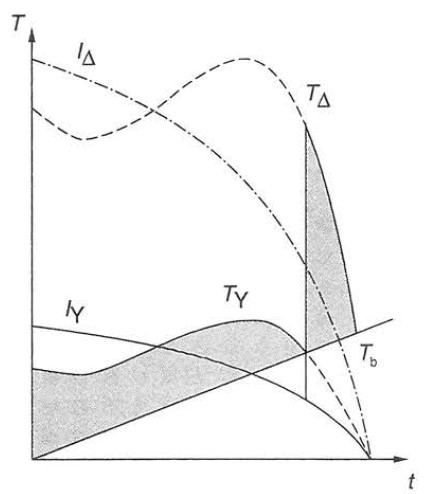
Figur: Strøm og moment ved stjerne/trekant-start av en kortslutningsmotor med belastningsmomentet Tb.
$I_{\mathrm{\Delta}}$ – Strøm ved trekantkoplet vikling
IY – Strøm ved stjernekoplet vikling
$T_{\mathrm{\Delta}}$ – Moment ved trekantkoplet vikling
TY – Moment ved stjernekoplet vikling
Tb – Typisk belastningsmoment
Effekt strøm- og spenningsforhold
Effekt strøm- og spenningsforhold
Et trefase lavspenningsnett består av de tre lederne L1, L2, L3 og kan være utført med eller uten 0-leder (N). Se NEK 410. Denne er tilkoblet generatorens eller transformatorens null punkt på lavspenningssiden.
Driftsspenningen
Spenningen mellom to av lederne (L1, L2, L3) er hovedspenningen (nettspenningen) og spenningen mellom en leder og 0-lederen er fasespenningen.
Frekvens/spenning: f = 60 Hz U = 240 V/ 440 V
Frekvens/spenning: f = 50 Hz U = 230 V/400 V
Tilkobling av trefasemotor
Motoren kobles til de tre lederne L1, L2 og L3. Motorens merkespenning i driftskobling må stemme overens med nettspenningen.
Ved direkte innkobling av kortslutningsmotorer og sleperingsmotorer, kan motorene ha enten stjernevikling eller trekantvikling.
Hvis en kortslutningsmotor skal startes med stjerne- trekantvender, må motorviklingen være utlagt for driftsspenningen i trekantkobling.
Motorer med viklingsutførelse 230V/400V kan ved direkte innkobling benyttes på nett med 230V når motor er koblet i trekant eller 400V når motor er koblet i stjerne. Koblingene utføres på klemmebrettet.
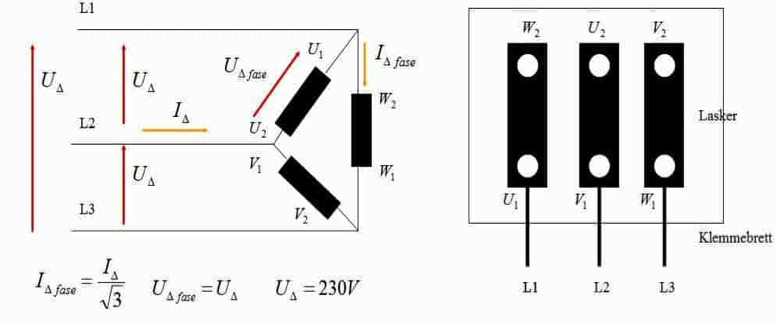
Strøm- og spenningsforhold i trekantkobling:
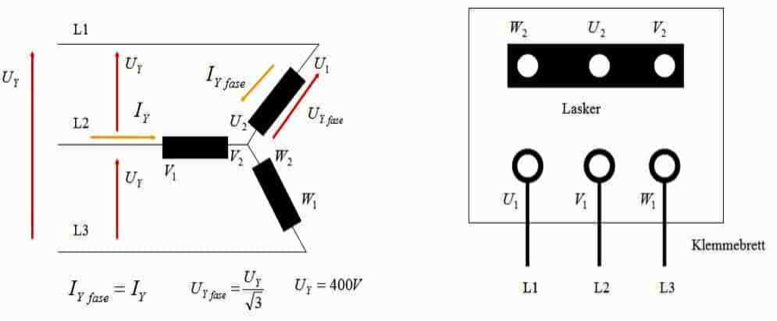
Strøm- og spenningsforhold i stjernekobling:
Eks. på utregning av strømmen i stjernekopling.
Trekantkobling: U = 400 V, In = 16 A If = 16 $\sqrt{3}$ = 9,24 A
Stjernekobling: U = 400 V, Uf = 400 * $\sqrt{3}$ = 230 V If = In = ?
Vi tar utgangspunkt i faseverdiene når vi skal finne fasestrøm i stjernekoplingen.
$\frac{(\Delta U)_f}{(\Delta I)_f} = \frac{(Y U)_f}{(Y I)_f}$
$(Y I)_f = \frac{(\Delta I)_f \cdot (Y U)_f}{(\Delta U)_f} = \frac{9.24 \cdot 230}{400} = \underline{\underline{5.31\ \text{A}}}$
Vi ser at fasestrømmen i stjerne på 5,31 A ligger godt under fasestrømmen i trekant, ergo så beskytter vi motoren både i stjernekopling og trekantkopling.
Tommelfinger regel: startstrøm - drift strøm – moment - effekt synker ned til en tredjedel ved stjernekopling.
$P_{Y} = \frac{P_{\mathrm{\Delta}}}{3}$
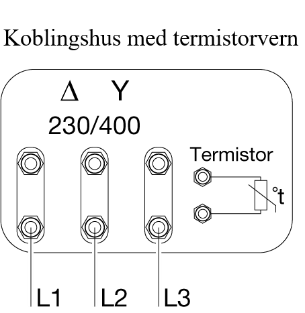
PTC-termistor som motorvern eller alarm
PTC-termistor som motorvern eller alarm
En PTC-termistor (Positive Temperature Coefficient-termistor) kan overvåke en elektromotor ved å utnytte sin temperaturavhengige motstandsegenskap. Her er en enkel forklaring på hvordan dette fungerer:
Hvordan en PTC-termistor fungerer:
- En PTC-termistor øker motstanden sin kraftig når temperaturen overstiger en viss terskelverdi.
- Ved lav temperatur er motstanden lav og relativt konstant.
- Når temperaturen når et kritisk punkt (f.eks. ved overoppheting i motoren), stiger motstanden brått.
Bruk i elektromotor-overvåking:
-
Plassering i motoren:
- PTC-termistorene støpes eller monteres direkte i motorviklingene, nær de områdene som blir varmest under drift.
-
Overvåking:
- En overvåkingsenhet (som et motorvernrelé) kobles til PTC-termistorene.
- Denne enheten måler spenningen eller strømmen over termistorene.
-
Respons ved temperaturøkning:
- Når temperaturen stiger til et farlig nivå, øker motstanden til PTC-termistoren.
- Overvåkingsenheten registrerer denne endringen og utløser et signal.
-
Tiltak:
- Systemet kan varsle om overtemperatur via en alarm.
- Alternativt kan det automatisk koble ut motoren for å hindre skade.
Fordeler med PTC-termistor i motorovervåking:
- Pålitelig: Ingen bevegelige deler, lite vedlikehold.
- Rask reaksjonstid: Reagerer raskt på temperaturendringer.
- Kompakt: Kan integreres direkte i viklingene.
- Sikkerhet: Forhindrer varmegang og skader på motoren.
Trefasemotorer for spesiell bruk
Strømfortrengningsmotorer
Kortslutningsmotorer utstyrt med spesielle rotorviklinger bygges for større ytelser og disse motorer kalles for strømfortrengningsmotorer, årsaken til dette er at rotorstavene legges enten i dype spor eller såkalte dobbeltspor.
Fortrengningsmotorens prinsipp bygger på rotorstrømmens frekvens (fr) under igangsetningen er betydelig større enn under normal drift. I det øyeblikk motoren får spenning står rotoren stille og da er slippen eller sakkingen lik 1 d.v.s. at fr= f. De dype spor i rotoren forårsaker at spredningsreaktansen i de enkelte deler av rotorstaven blir større jo nærmere de kommer bunnen av sporet.
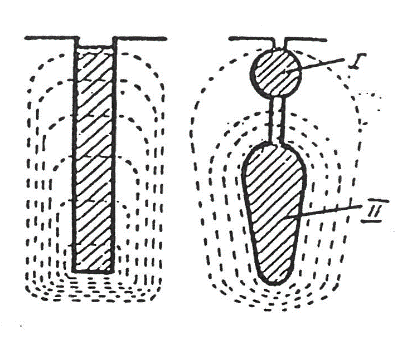
Da rotorfrekvensen under starten er høy, blir reaktansen meget høy i bunnen av sporet, dette vil igjen medføre at strømmen blir forskjøvet oppover i sporet. Ser vi nå på dobbeltsporet på fig. så er virkemåten bygget på samme prinsipp som beskrevet over.
I det øyeblikk motoren settes i gang, blir rotorstrømmen i vikling II, av samme grunner som ovenfor presset opp i vikling I som har stor ohmsk motstand, men liten induktiv motstand. Dette medfører at igangsettingsmomentet blir stort og startstrømmen liten. Når turtallet øker så vil rotorfrekvensen (fr) avta og dette medfører at også den induktive motstand (XL) i vikling II avtar. Når rotasjonsfrekvensen har nådd nominelt turtall så ha rotor strømmen fordelt seg likt i forhold til rotorviklingenes tverrsnitt. Dobbeltspormotorer bygges i alle størrelser fra 20 kW og oppover til et par tusen kW. De større motorer er beregnet for direkte innkopling på høyspentnett.
Tannhjulsmotorer
For direkte drift av langsomt gående maskineri er det ofte at kortslutningsmotoren kommer til kort pga. turtallet, fordi den er bundet til bestemte turtall. Tannhjulsveksler blir i denne sammenheng ofte brukt, og man anvender da normale hurtigløpende motorer direkte tilkoplet gearhuset slik at den leveres som en kompakt enhet. Den kompakte enheten kalles da tannhjulsmotor.
Bruksområde for tannhjulsmotoren er heiser, anleggsmaskiner, landbruket og i industrianlegg. Bruken av denne type motor forekommer også på maritime anlegg, men i begrenset utstrekning.
Bremsemotoren
En bremsemotor er en elektrisk motor som er utstyrt med en brems. Dette gjør at motoren kan stoppe raskt og sikkert når det er nødvendig. Motoren brukes ofte i applikasjoner hvor presis kontroll over bevegelse er viktig, som for eksempel i løfteutstyr, kraner og maskiner.
Bremsemotorer kan komme i forskjellige typer og konfigurasjoner, inkludert 3-fase-motorer med både vekselstrømbremser (AC) og likestrømbremser (DC). Når strømmen til motoren brytes, aktiveres bremsen automatisk for å stoppe motorens rotasjon.
Trefasemotor med fjærtrykkbremse.
Trefasemotorer med fjærtrykkbremse er en type elektrisk motor som kombinerer kraften til trefasemotorer med presis bremsekontroll ved hjelp av en fjærtrykkbremse. Dette gjør dem spesielt egnet for applikasjoner hvor det er viktig å kunne stoppe rotasjonen raskt og nøyaktig, som i heiser, transportbånd og industrielt maskineri.
Hovedfunksjonene til slike motorer inkluderer:
- Trefasemotor: Utnytter trefaset elektrisk strøm for effektiv og kraftig drift, noe som gir høy ytelse og energieffektivitet.
- Fjærtrykkbremse: Aktiveres automatisk når strømmen brytes, og gir dermed umiddelbar stopp av motoren. Bremsen holdes normalt i frigjort posisjon ved hjelp av en elektromagnet, og når strømmen til elektromagneten brytes, vil fjærene trekke bremsen inn og stoppe motoren.
- Presis Kontroll: Fjærtrykkbremsen gir mulighet for nøyaktig og sikker stopp av motoren, noe som er essensielt i mange industrielle bruksområder.

Bilde hentet fra LØNNE motorkatalog.
Disse motorene brukes ofte i applikasjoner som krever stor pålitelighet og sikkerhet, som løfteutstyr, kraner, transportbånd og ulike typer maskineri.
SFB Elektromagnetisk bremse.
Momentmotorer
En momentmotor, ofte kalt dreimomentmotor eller torque motor på engelsk, er en type elektrisk motor spesielt utviklet for å levere høyt dreiemoment ved lav rotasjonshastighet eller stasjonær posisjon. Momentmotorer brukes i ulike industrisektorer hvor presis og kraftig rotasjonskontroll er nødvendig.
Hovedegenskaper ved momentmotorer inkluderer:
- Høyt dreiemoment: De kan levere høye mengder dreiemoment selv ved lavere hastigheter, noe som er ideelt for applikasjoner som krever stor kraft, men minimal rotasjon.
- Direktedrift: De er ofte designet for å bli koblet direkte til lastene, uten behov for girsystem eller andre mellomledd. Dette reduserer slitasje og mekaniske tap.
- Presis kontroll: De gir svært nøyaktig posisjons- og hastighetskontroll, noe som er kritisk i maskiner med presisjonskrav som CNC-maskiner, roboter og verktøymaskiner.
- Lite vedlikehold: Færre bevegelige deler sammenlignet med tradisjonelle motorer og girsystemer, gir momentmotorer en høy driftssikkerhet og lavt vedlikeholdsbehov.
Momentmotorer finnes i forskjellige typer, inkludert synkrone og asynkrone varianter, og kan bruke forskjellige teknologier som permanentmagnet eller elektromagnetiske felt.
Intermitterende drift
Intermitterende drift refererer til en driftsmetode hvor motoren eller maskinen opererer i korte perioder, fulgt av pauser eller hvileperioder før neste driftssyklus starter. Denne syklusen med på- og av-perioder fortsetter så lenge systemet er i bruk. Intermitterende drift er vanlig innen mange applikasjoner og bransjer, som emballasjeproduksjon, materialhåndtering og automatiserte prosesser.
Hovedtrekkene ved intermitterende drift er:
- Syklisk drift: Ved jevne mellomrom startes og stoppes motoren, noe som reduserer motorkomponenters slitasje og forlenger levetiden til systemet.
- Energibesparing: Motoren forbruker energi bare under de periodene hvor den er aktiv, noe som kan gi betydelige energieffektiviseringsgevinster.
- Varmehåndtering: Hvilene mellom perioder med drift hjelper på å redusere motorens temperaturøkning, og sikrer dermed pålitelighet over tid.
Intermitterende drift er også kjent som periodisk drift eller syklisk drift, og kan konfigureres for å møte spesifikke applikasjonsbehov.
Utførelse A for S1-drift.
Denne momentmotoren kan når den er koblet i stjerne ligge tilkoblet nominell spenning, og i stillstand utvikle sitt nominelle dreiemoment. Det kan korttidig tilkobles nettet i trekant og utvikler da ca. 3 ganger nominellmomentet og kan brukes til å løsrive fastkjørte maskinerier. Man må da imidlertid påse at motoren kobles fra nettet før skadelig oppvarming opptrer. På slike innretninger er det vanlig å bruke termistorbeskyttelse.
Utførelse B for S2-drift 25% ED.
Denne motoren egner seg spesielt for intermitterende drift 25% ED. Stadig stillstand med nominell spenning tilkoblet er ikke mulig. I motsetning til A-utførelsen er en belastning på 3–4 - ganger nominellmomentet mulig.
Hensyn å ta på grunn av temperaturen
Hensyn å ta på grunn av temperaturen
Momentmotorer benyttes som oftest som koblingselement og ligger også i stillstand kontinuerlig koblet til nettet.
Hvis momentmotoren bygges inn i en verktøymaskin eller lignende må det sørges for best mulig varmeavledning. Hvis den blir montert frittstående bør den forsynes med berøringsbeskyttelse.
Med hensyn til den høye temperaturen anbefales det også å benytte varmebestandig kabel ved tilkoblingen. Fra motorens klemmebrett kan det f.eks. legges opp en SINOTHERM-ledning til en koblingsboks og videre derfra med vanlig ledning.
For å få en bedre utnyttelse av motoren leveres de ofte med en isolasjonsklasse F.
Isolasjonsmaterialer for viklinger
Vi kan dele opp isolasjonsmaterialene i 5 isolasjonsklasser i henhold til nedenstående tabell.
Se også i NEK 410A
| Isolasjonsklasse | A | E | B | F | H |
|---|---|---|---|---|---|
| Omgivelsestemperatur (oC) | 40 | 40 | 40 | 40 | 40 |
| Tillatt temperaturstigning (oC) | 60 | 75 | 80 | 105 | 125 |
| Temperaturreserve (oC) | 5 | 5 | 10 | 10 | 15 |
| Maks temperatur (oC) | 105 | 120 | 130 | 155 | 180 |
Temperaturklasser i eksplosjonsfarlige områder
Temperaturer for elektrisk utstyr: IEC 60079–0 og NEK 410
Her er en tabell som viser temperaturklassene T1 til T6 for elektrisk utstyr. Disse klassene angir maksimal overflatetemperatur som utstyret kan nå i eksplosjonsfarlige områder (ATEX-klassifisering), slik at det ikke antenner en gass- eller dampatmosfære.
| Temperaturklasse | Maks. overflatetemperatur | Typiske gasser/damper |
|---|---|---|
| T1 | 450 °C | Karbonmonoksid, metan |
| T2 | 300 °C | Etylen |
| T3 | 200 °C | Bensin, aceton |
| T4 | 135 °C | Eter, metanol |
| T5 | 100 °C | Etyl-nitrat |
| T6 | 85 °C | Karbondisulfid (CS₂) |
Viktig å vite:
- Valg av temperaturklasse avhenger av tenn temperaturen til de eksplosive gassene eller dampene i området.
- Utstyr må ha en lavere maksimal overflatetemperatur enn den laveste tenn temperaturen i området der det brukes.
Motordriftstyper
Motordriftstyper
Motordriftstypen er angitt med en av betegnelsene S1 - S9. S1 er den normale operasjonen hvoretter motorens nominelle effekt er indikert. I visse operasjoner kan imidlertid motorens nominelle effekt økes. Avhengig av hvordan belastningen og dermed motorens utgangseffekt varierer med tiden, er forskjellige driftstyper gitt nedenfor. Den nominelle effekten for hver type drift bestemmes av en last test, som motoren må passere uten å overskride temperaturgrensene som er satt i IEC 60034–1: 2017.
For drift type S2 må betegnelsen følges av lengden på lastperioden. I driftsmodusene S3 og S6 må betegnelsen følges av en periodisk faktor. Eksempel: S2 60 minutter, S3 25%, S6 40%. Ved plikter S4, S5, S7, S8, S9, må betegnelser følges av treghetsmomentet etc.
S1 - Kontinuerlig drift
Motoren kjører med konstant belastning i tilstrekkelig tid til å nå temperaturbalansen.
S2 - Kortsiktig drift
Motoren fungerer med konstant belastning, men ikke lenge nok til å nå temperaturbalansen. Hvileperiodene er lange nok til at motoren når omgivelsestemperatur.
S3 - Periodisk drift
Sekvensielle, identiske kjøre- og hvilesykluser med konstant belastning. Temperaturbalansen oppnås aldri. Startstrøm har liten innvirkning på temperaturøkningen.
S4 - Periodisk drift med start
Sekvensiell, identisk start-, løpe- og hvilesyklus med konstant belastning. Temperaturbalansen oppnås ikke, men startstrømmen påvirker temperaturøkningen. (Ligner på S3, men det er en betydelig starttid innen den periodiske operasjonen.)
S5 - Periodisk drift med elektrisk bremsing
Sekvens av identiske driftssykluser - start, drift, bremsing og hvile. Igjen oppnås ikke termisk likevekt.
S6 - Periodisk drift med kontinuerlig drift
Sekvensielle, identiske driftssykluser med en periode ved last etterfulgt av en periode uten belastning. Forskjellen mellom S1 er at motoren går uten belastning, uten å stoppe.
S7 - Periodisk drift med kontinuerlig drift med elektrisk bremsing
Sekvensielle identiske sykluser med start, kjøring med konstant belastning og elektrisk bremsing. Ingen hvileperioder.
Pr S6, men med betydelige start- og elektriske bruddperioder. Igjen kjører motoren uten belastning i periode i stedet for å stoppe.
S8 - Periodisk drift med kontinuerlig drift med tilhørende endringer i belastning/hastighet
Sekvensielle, identiske driftssykluser kjører med konstant belastning og gitt hastighet, og kjører deretter med andre konstante belastninger og hastigheter. Ingen hvileperioder og termisk likevekt er ikke nådd.
S9 - Drift med ikke-periodiske belastnings- og hastighetsvariasjoner (frekvensomformer drift)
Last og hastighet varierer med jevne mellomrom i det tillatte driftsområdet. Hyppig overbelastning kan forekomme.
Motorer i eksplosjonsfarlige områder
Motorer i eksplosjonsfarlige områder
Eksplosjonsfarlige områder er områder som er avgrenset med henblikk på at det er eksplosjonsfarlig atmosfære i område.
Områdene kan inndeles i soner, og definisjonen av den enkelte sone er beskrevet i NEK 410.
I Europa er det ATEX-direktivet som beskriver hvordan Ex-utstyr skal merkes.
I tillegg kan følgende relaterte standarder være relevante, avhengig av type beskyttelse:
| Standard | Innhold |
|---|---|
| IEC 60079–1 | Flammeproof enclosure "d" (trykkfast kapsling) |
| IEC 60079–2 | Pressurization "p" |
| IEC 60079–7 | Increased safety "e" |
| IEC 60079–11 | Intrinsically safe "i" |
| IEC 60079–18 | Encapsulation "m" |
Områdene ombord skal med hensyn på eksplosjonsfaren, være klassifisert i to hovedområder:
- farlig område
- sikkert område
Farlig område skal være klassifisert i tre soner:
- SONE 0
- SONE 1
- SONE 2
Vi skal nå se på bruk av motorer i de enkelte soner, og hvilke krav som stilles til den enkelte motor i hver sone. Det er soneinndelingen som bestemmer valg av motortype.
SONE 0:
Områder hvor det uavbrutt eller i lange perioder forekommer en eksplosiv blanding av brennbar gass, damp eller svevende væskedråper og luft.
DET KAN IKKE BENYTTES MOTORER I SONE 0
SONE 1:
Områder hvor det leilighetsvis må regnes med at det under normale driftsforhold forekommer en eksplosiv blanding av brennbar gass, damp, eller svevende væskedråper eller lt1ft.
I SONE 1 KAN DET BENYTTES MOTORER
Motorer som skal benyttes i sone 1 skal være spesielt konstruert for eksplosjonsfarlige områder, og hvor det skal medfølge et spesielt godkjent sertifikat fra godkjent prøveinstans.
SONE 2:
Områder hvor det kan regnes med at det bare unntaksvis og kortvarig forekommer en eksplosiv blanding av brennbar gass damp eller svevende væskedråper og luft.
I SONE 2 KAN DET BENYTTES MOTORER
Motorer som skal benyttes i sone 2 kan være normale kortslutningsmotorer, men den innvendige overflate temperaturen på statorvikling og rotorvikling må ikke under drift overskride den aktuelle temperaturklasse til motoren. Dette vil igjen si at overflate temperaturen ikke må overskride 80 °C, hvis dette kan hende den enkelte motor så skal produsent angi dette i sine motorkataloger.
Motorenes kapslingsgrad er bestemt ut ifra tabeller som finnes i NEK 410. Dette gjelder for vanlige standard motorer.
Når det gjelder motorer for bruk i eksplosjonsfarlige områder så er det motorens utførelse som bestemmer hvilken beskyttelsesklasse den skal tilhøre. Denne motor vil også ha en IP-grad.
Beskyttelsesklasser:
- motorer i beskyttelsesklasse "e" tennsikker utførelse (Ex e)
- motorer med beskyttelsesklasse "d" eksplosjonssikker utførelse (Ex d)
- motorer i beskyttelsesklasse "p" overtrykkskapsling (Ex p)
Motorer i beskyttelsesklasse "Ex e" (tennsikker utførelse).
Disse motorene er videreutviklet fra vanlige, luftkjølte, trefase kortslutningsmotorer (beskyttelsesgrad IP55 i henhold til IEC 60034–5). De har i hovedsak samme mekaniske konstruksjon og fysiske dimensjoner som standardmotorer, men deres ytelse og driftsegenskaper er tilpasset kravene til eksplosjonsbeskyttelse.
Typiske egenskaper for motorer i beskyttelsesklasse "Ex e":
Motorer med tennsikker utførelse skal oppfylle kravene i EN 60079–7 (tidligere DIN EN 50019), som regulerer «forbedret sikkerhet» for elektriske apparater i eksplosjonsfarlige områder. Følgende punkter er særlig viktige:
- Motortype: Kun kortslutningsmotorer (squirrel-cage) er tillatt.
- Kapslingsgrad: Minimum IP20 for motoren og IP54 for tilkoblingsboksen (klemkassen). Det anbefales å bruke overflatekjølte motorer med kapslingsgrad IP44 eller høyere.
- Beskyttelsesgitter: Luftinntak kan ha en maskevidde større enn 12 mm, så lenge krav til mekanisk beskyttelse og sikkerhet opprettholdes.
- Elektriske tilkoblinger: Skal være utstyrt med overfalsklemmer. Alle skruer og bolter må sikres mot å løsne (f.eks. med låsemidler).
- Koblings hus: Skal være godkjent iht. eksplosjonsbeskyttelseskrav og kan omfatte et sertifisert klemmebrett eller spesialdesignet koblingsboks.
- Jording: Jordingsskrue skal finnes både inne i koblingshuset og på motorens ytre kapsling.
- Viklingsimpregnering: Må være godkjent av et akkreditert testorgan (f.eks. PTB eller tilsvarende).
- Merking: Beskyttelsesklasse, temperaturklasse og sertifikatnummer skal være tydelig angitt på motorens typeskilt eller på et separat merkeskilt.
De fleste Ex e-motorer har spesialtilpasset vikling for å redusere effekttap og varmeutvikling sammenlignet med standardmotorer.
Merknader
- DIN EN 50019 er nå erstattet av EN 60079–7 / IEC 60079–7, som er den gjeldende standarden for tennsikker ("e") utførelse.
- PTB (Physikalisch-Technische Bundesanstalt) er fortsatt en anerkjent instans, men det er vanlig nå å referere til "sertifisert tredjepart" eller "notified body" i henhold til ATEX (ATmospheres EXplosibles).
- ATEX er navnet på to EU-direktiver som regulerer utstyr og arbeidsmiljø i eksplosjonsfarlige områder – områder hvor det finnes brennbare gasser, damp, tåke eller støv.
Opprettholdelse av eksplosjonsbeskyttelsen under drift.
For å sikre at eksplosjonsbeskyttelsen opprettholdes under drift, må hver motor være utstyrt med en motorvernbryter innstilt på motorens merkestrøm.
Ved valg av motorvernbryter må man påse at den – i henhold til sin utløse karakteristikk i kald tilstand (20 °C) – kobler ut innenfor den tE-tiden som er angitt på motorens typeskilt og i tilhørende sertifikat, i tilfelle rotoren skulle blokkere (f.eks. ved fastbremsing).
Når det benyttes en standard motorvernbryter, må motoren ikke utsettes for hyppige starter over kort tid. Antall startforsøk må begrenses til normal starthyppighet, for å unngå overbelastning og varmeoppbygging.
For polomkoblbare motorer (motorer med flere turtall) i Ex e-utførelse, må det benyttes en egen motorvernbryter for hvert turtall. Disse motorvernbryterne må være mekanisk og elektrisk forriglet, slik at det ikke er mulig å koble direkte fra ett turtall til et annet mens motoren er i drift.
Temperatur og eksplosjonsbeskyttelse.
I eksplosjonsfarlige områder kan brennbare gasser trenge inn i alle deler av motoren. Derfor er det varmeste punktet i motoren avgjørende for sikkerheten.
For å sikre tilstrekkelig eksplosjonsbeskyttelse må det mest kritiske driftstilfellet vurderes. For en kortslutningsmotor er dette når rotoren er fastlåst (stillestående), mens statoren fortsatt er tilkoblet nominell spenning og frekvens.
I henhold til IEC 60079–0, er det fastsatt maksimum tillatt temperatur for både stator- og rotorviklinger under slike ekstreme forhold. Dersom disse temperaturgrensene nås – enten i stator eller rotor – må motoren kobles ut umiddelbart ved hjelp av en bryter med termisk overstrømsvern.
Grensetemperaturen er avgjørende for motorens belastningsevne og utnyttelse. I denne sammenheng skiller man mellom:
- Stator-kritiske motorer – der temperaturen i stator er begrensende.
- Rotor-kritiske motorer – der temperaturen i rotor er begrensende.
Dette har betydning for tE-tiden, som er den maksimale tiden motoren kan være tilkoblet under blokkert rotor før temperaturen når en kritisk grense.
Den maksimalt tillatte omgivelsestemperaturen er som standard satt til + 40 °C, med mindre annet er spesifisert.
Statorens tillatte viklingstemperatur beregnes som summen av omgivelsestemperaturen og motorens interne temperaturgrense iht. klassifisert temperaturklasse.
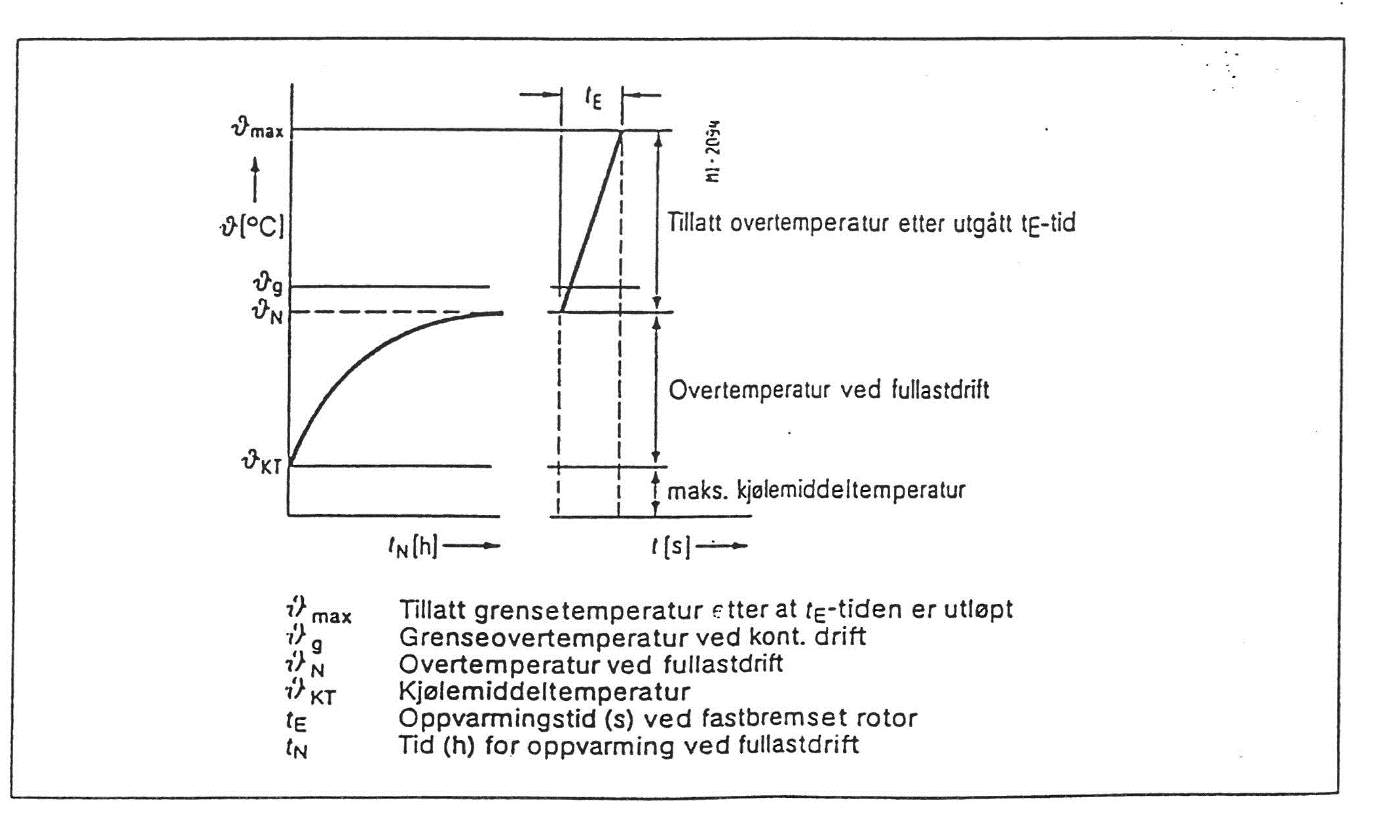
Begrepet tE - tid
Motoren må senest kobles ut når enten rotor- eller statorviklingen har nådd temperaturen ϑ maks. Når motoren belastes med startstrømmen, stiger temperaturen meget hurtig og temperaturen ϑ oppnås på meget kort tid.
Den tid som gå med til temperaturen ϑ maks, nåes med utgang fra temperaturen ved fullast drift og fast bremset rotor kalles tE-tid dvs. oppvarmingstiden. For at motoren skal kunne starte opp uten utilsiktet utkobling fra bimetallreleene, er det foreskrevet en minimums tE-tid, avhengig av startstrømforholdet IA/IN.
Med referanse i fastlagte prøvebestemmelser for oppvanningstiden tE må startforholdet når det gjelder motorer i beskyttelsesklasse Ex e undersøkes spesielt.
Motorer med beskyttelsesklasse Ex e bør normalt ha en starttid som er:
$t_{A}\ \leq 1,7 * \ t_{E}$
Hvis starttiden tA er noenlunde den samme som tE-tiden, kan det bli vanskeligheter med å beskytte en strømovervåket motor, da man f.eks. ved gjentatte starter får en falsk utkobling eller at utkobling uteblir selv om maksimal temperatur oppnås på stator eller rotor fordi motorvernet har lavere termisk tidskonstant enn motor og vil derved avkjøles raskere.
Motorer som skal benyttes til andre driftsarter enn S1 må ha beskyttelsesklasse Ex d.
Motorer med beskyttelsesklasse Ex d (eksplosjonssikker kapsling).
De fleste motortyper kan leveres i beskyttelsesklasse Ex d.
Mens beskyttelsesklasse Ex e (forbedret sikkerhet) bygger på en standardmotor med nødvendige tilpasninger, er en Ex d-motor konstruert etter helt andre prinsipper. Her er kapslingen utformet for å:
- tåle en intern eksplosjon uten strukturell skade, og
- hindre at flammer eller varme gasser slipper ut og antenner den omgivende atmosfæren.
Målet med Ex d-beskyttelse er altså å inneholde og kontrollere en eventuell eksplosjon innvendig i motoren, og sikre at trykkbølger og flammer ikke forårsaker fare utenfor kapslingen.
Motorer i beskyttelsesklasse Ex d leveres i følgende utførelse: Ex d - IP 55.
Eksplosjonssikre motorer (Ex d) kan som hovedregel belastes med full nominell effekt opp til og med temperaturklasse T4 (maks. overflatetemperatur 135 °C).
Ved krav om høyere sikkerhet – som ved temperaturklasse T6 (maks. overflatetemperatur 85 °C) – kan det være nødvendig å redusere motorens effekt for å holde overflatetemperaturen innenfor de definerte grensene. Dette gjelder imidlertid bare enkelte motortyper.
Motorer i beskyttelsesklasse Ex p (overtrykkapsling).
Beskyttelsesklasse Ex p benyttes i situasjoner der motorer med forbedret sikkerhet (Ex e) ikke er tilstrekkelige, eller der eksplosjonssikre motorer (Ex d) blir for kostbare eller uhensiktsmessige.
Overtrykkapsling (pressurization) er en metode som brukes særlig for større motorer, som:
- kortslutningsmotorer,
- sleperingsmotorer,
- trefase kommutatormotorer,
- likestrøms motorer.
Beskyttelsen oppnås ved at motorens kapsling holdes under et konstant overtrykk av ren luft eller en inertgass (f.eks. nitrogen), slik at eksplosiv atmosfære ikke kan trenge inn i kapslingen.
Driftsbetingelser
For at Ex p-beskyttelsen skal være effektiv, gjelder følgende krav:
- Startforrigling: Motoren kan først startes etter at kapslingen er gjennomspylt med luft eller inertgass tilsvarende minst 5 ganger volumet av kapslingen.
- Overvåking: Dersom forsyningen av spyle- eller overtrykkmedium stanser (f.eks. ved feil på fremmedventilatoren), må motoren automatisk kobles ut for å unngå risiko for antennelse.
Merknad
Ex p-beskyttelse deles videre inn i underkategoriene px, py og pz, avhengig av bruksområde og sikkerhetsnivå, i henhold til IEC 60079–2.
Merking:
Alt godkjent Ex-utstyr som skal tas med inn i et eksplosjonsfarlig område skal merkes. I Europa er det ATEX-direktivet som beskriver hvordan Ex-utstyr skal merkes. De samme retningslinjene er innført i Norge, i [Forskrift om utstyr og sikkerhetssystem til bruk i eksplosjonsfarlig område]{.underline}. Ex-utstyr er som regel merket både med ATEX-merke og IEC 60079-serien, som er en internasjonal standard. Hensikten med merkingen er å gi deg informasjon om at utstyret er Ex-godkjent, om beskyttelsesarter, utstyr- og gassgruppe, temperaturklasse og beskyttelsesnivå.
Av merkingen skal du blant annet kunne lese hvilke soner og gasser eller typer støv utstyret er laget for, hvilke ytre påkjenninger utstyr tåler og hva slags beskyttelsestype det har.
- Ex d = Flameproof (IEC 60079–1)
- Ex e = Increased safety (IEC 60079–7)
- Ex p = Pressurization (IEC 60079–2)
- Alle beskyttelsesmetoder må brukes sammen med korrekt merking, godkjenning og installasjon iht. IEC 60079–14.
Krav om opplæring.
Det er viktig at du som jobber i eksplosjonsfarlige områder kjenner til denne merkingen, slik at du ikke setter deg selv eller andre i fare. Faktisk stiller myndighetene krav om at du som skal jobbe i eksplosjonsfarlige områder, har gjennomgått og kan dokumentere opplæring, for eksempel gjennom e-læringskurs som [Sikker adferd i eksplosjonsfarlige områder]{.underline}. Der kan du blant annet lære mer om merking og standarder. Er du i tvil om hva som klassifiseres som et Ex-område?
Sammenligning: Ex d, Ex e og Ex p
| Beskyttelses-klasse | Betegnelse | Prinsipp | Bruksområde | Fordeler | Ulemper |
|---|---|---|---|---|---|
| Ex d | Eksplosjons-sikker kapsling | Tåler og inneholder intern eksplosjon – hindrer flammeutslipp | Vanlig i grove industrier (prosess, olje/gass) | Robust, krever ingen ekstra utstyr | Tung, dyr, vanskelig å vedlikeholde |
| Ex e | Forbedret sikkerhet | Forhindrer gnister, overflatetemp. og dårlig tilkobling | Standardvalg for mindre og middels motorer | Rimeligere, enklere | Lavere beskyttelses- nivå, må kombineres med annen beskyttelse |
| Ex p | Overtrykks kapsling | Hindrer eksplosiv atmosfære i å komme inn via overtrykk | Store motorer, kommutatormotorer, DC-motorer | Egnet for store og spesial-motorer | Krever luft/inertgass, overvåkning og forrigling |
Ny og gammel standard:
| Betegnelse | Status | Kommentar |
|---|---|---|
| EEx e EEx d EEx p |
Utdatert | Brukt i eldre europeiske standarder (før ATEX og IEC-harmonisering) |
| Ex e Ex d Ex p |
✅ Gyldig | Brukes i dagens IEC 60079-serie og ATEX-direktiv |
Fasekompensering
Fasekompensering
Fasekompensering er lite brukt ombord i skip, men skal man ut nytte energien bedre så vil det også bli aktuelt med fasekompensering ombord i dagens skip. Tidligere har vi lært at induktiv energi pendler mellom forbruker og kilde. Se avsnittet for fase kompensering av
1-fase kretser. Det er kun den aktive energien som blir omgjort til arbeid på forbrukerstedet. Motoren er en induktiv forbruker som trekker induktiv effekt, og det er i slike tilfeller man ønsker å fase kompensere. Det som kan motvirke den induktive effekten i å pendle tilbake til kilden er kondensatorer som er koplet i parallell med motoren så nær motoren som mulig.
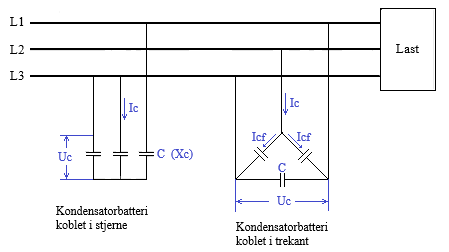
Ved trefasenett kan kondensatorene enten koples i trekant eller i stjerne, og det kalles da for et kondensatorbatteri.
De grunnleggende formlene
$Xc = \frac{1}{2 * \pi * f * c}$
$Uc\ = \ Ic\ *\ Xc$
Disse formlene er de grunnleggende formlene, men ved trefase beregninger så skal vi ta
hensyn til den reaktive effekten (Qc) som kondensatorbatteriet trenger for å gjennomføre fasekompenseringen. Vi kan også ta hen syn til den reaktive strømkomponenten som kondensatorbatteriet trenger (le). Jeg skal vise begge eksemplene.
Hvordan bør kondensatorene koples.
Kapasitansen C hos den enkelte kondensator ved trekantkopling er bare en tredjedel av kondensatorkapasitansen ved stjerne kopling ved samme reaktive effekt.
Kondensatorens klemmespenning er imidlertid ved trekantkopling tre ganger større enn ved stjernekopling. Da omkostningene for en kondensator vesentlig avhenger av kapasitansen, brukes vanligvis trekantkopling ved lavspentanlegg hvor isolasjonen ikke er noe problem. Ved høyere spenninger over 3 kV brukes gjerne stjernekopling, men da får vi bare fasespenningen over kondensatoren.
Fordelen ved innkopling av kondensatorer.
Dårlige belastede asynkronmotorer arbeider som nevnt med en lavere effektfaktor enn ved full last, da motorens magnetiseringsstrøm øker lite fra tomgang til full belastning.
En industribedrift som arbeider med dårlige belastede motorer, vil ha et anlegg med lav effektfaktor. Dvs. at motorene er for store i forhold til den lasten de skal drive.
De fleste EL-verk krever en ekstra strømavgift for anlegg som arbeider med en lav effektfaktor.
Man må derfor sørge for at motorer ikke velges unødige store i forhold til lasten. Dette medfører en forholdsvis stor reaktiv strømkomponent i forhold til den aktive strømkomponent.
Bedring av faseforskyvning kan foretas på to måter:
1) Synkronmotorer som over magnetiseres, vil gi en reaktiv strøm som er kapasitiv og ligger 180 grader foran den induktive strømmen som magnetfeltene krever til sin oppbygning.
2) Statiske kondensatorer.
Ved å forbedre effektfaktoren ved et anlegg som er toppbelastet, og som arbeider med en lav effektfaktor, kan ytterligere effekt overføres.
Eksempel motoroppgave:
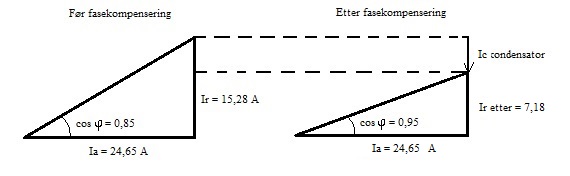
Vi ønsker å forberede effektfaktoren (cos $\varphi$) til 0,95.
Spenning, strøm og cos $\varphi$ står på merkeskiltet til motoren.
Cos $\varphi$ = 0,85 da blir sin $\varphi$ = 0,5268 og tan $\varphi$ = 0,6197
Først må vi nå finne den tilførte aktive effekten (Pt) og den reaktive effekten (Q).
$P_{t} = \ U * I * cos\varphi * \sqrt{3}$ $P_{t} = 400 * 29 * 0,85 * \ \sqrt{3} = 17078\ W$
$Q = \sqrt{3} * U * I * \sin\varphi$ $Q = \sqrt{3} * 400 * 29 * 0,5268 = 10584\ VAr$
Motoren trekker en aktiv strømkomponent som går med til lasta og friksjon.
$I_{a} = I_{h} * cos\varphi = 29 * 0,85 =\underline{24.65 A}$
Motoren trekker også en reaktiv strømkomponent som går med til å dekke magnetiseringsbehovet til motoren.
$I_{r} = I_{h} * \sin\varphi = 29 * 0,5268 = 15,28\ A$
a) Vi skal nå beregne kondensatorens reaktive effekt.
Ny cos $\varphi$ = 0,95 da blir sin $\varphi$ = 0,3122 og tan $\varphi$ = 0,3287
Nå må vi først finne den reaktive effekten etter fase kompensering. Den reaktive effekten pendler mellom generator og motor. Vi må passe på å bruke tan ϕ da den aktive effekten Pt ikke blir forandret, det er kun Q som skal justeres. $Tan\ \varphi = \frac{P}{Q}$
Ny Q = $P_{t} * \tan\varphi = \ \ 17078 * 0,3287 = 5614\ VAr$
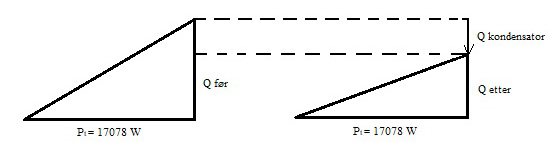
Q c = Q før – Q etter = 10584 VAr – 5614 VAr = 4970 VAr
Ved hjelp av trekantene er det vist hvordan vi kommer frem til kondensator effekten som er nødvendig for å bedre effektfaktoren til 0,95.
Men ved beregninger heretter så bruker vi formelen og setter direkte inn i den.
FORMEL
$Q_{c} = P_{t} \cdot \left( \tan\varphi_{\text{før}} - \tan\varphi_{\text{etter}} \right)$
$Qc\ = 17078\ * (0,6197 - 0,3287)\ = 17078\ * \ 0,291\ = \ 4970\ VAr$
Sjekk linjene over
xxxxxx
Før fasekompensering så pendlet det en reaktiv effekt på 10584 VAr mellom generator og motor. Etter fasekompenseringen så ble denne reaktive effekten redusert betraktelig fra nettet.
Vi har nå fjernet differansen mellom reaktiv effekt før og etter fasekompensering. Nå pendler det 5614 VAr mellom generator og motor. Differansen på 4970 VAr pendler nå mellom kondensatorbatteriet og motor.
Det samme vil skje med de tilsvarende verdier for strømmene.
b) Nå skal vi beregn kapasitansen C pr. fase for de enkelte kondensatorer i kondensatorbatteriet.
$\omega = 2 * \ \pi * f$ (f = frekvens i Hertz)
$X_{C} = \frac{1}{\omega * C} = \frac{1}{2 * \ \pi * f * C}$ (C = kapasitans i Farad)
Ohms lov: $U\ = \ I\ *\ Z$
$Uc\ = \ Ic\ *\ Xc$ $U_{C} = \ I_{C} * \frac{1}{\omega * C}$ $U_{C} = \frac{\text{Ic}}{\omega * C}$
Kapasitansen blir:
$C_{\text{fase}} = \frac{I_{c,f}}{U_{c,f} \cdot \omega}$
Sjekk linjene over
xxxxx
1-fase: $I_{C} = \ U_{C} * \ \omega * C$ 3-fase: $I_{\text{Cf}} = \ U_{\text{Cf}} * \ \omega * C$
Strømmen til kondensatorbatteriet er en ren reaktiv strømkomponent det vil si:
$Ic\ = \ I\ *\ sin\ \varphi\ \ (sin\ \varphi\ = \ 1)$
Kondensatorbatteriets reaktive effekt:
Qc = Ucf2 * ω *C * 3
Ucf er fasespenningen og dermed brukes formelen både i stjerne og trekantkobling av kondensatorbatteriet.
Trekantkobling ($\mathrm{\Delta})$:
$C_{\mathrm{\Delta}} = \frac{\text{Qc}}{\text{Uc}_{f}^{2} * \ \omega * 3} = \frac{4970}{400^{2} * 2 * \ \pi * 50 * 3} = 3,296 * 10^{- 5} = 32,96 * 10^{- 6}\ F = 32,96\ \mu F$
Stjernekobling (Y):
$C_{Y} = \frac{\text{Qc}}{\text{Uc}_{f}^{2} * \ \omega * 3} = \frac{4970}{231^{2} * 2 * \ \pi * 50 * 3} = 9,882 * 10^{- 5} = 98,82 * 10^{- 6}\ F = 98,82\ \mu F$
c) Beregn kondensatorbatteriets hovedstrøm og fasestrøm i trekant kobling.
$I_{h} = \frac{P}{\sqrt{3} * U * cos\varphi}$= $\frac{17078}{\sqrt{3} * 400 * 0,85} =\underline{\underline{29 A}}$
I vårt tilfelle er hovedstrømmen (Ih) også oppgitt på motorskilt.
$ I_{r,\text{etter}} = I_{a} \cdot \tan\varphi = 24.65 \cdot 0.3287 = \underline{8.1\,\mathrm{A}} $
Kondensatorbatteriets hovedstrøm:
Ic = Irfør - Iretter = 15,28 - 8,1 = 7,18 A
$Ic = \frac{\text{Ic}_{h}}{\sqrt{}3} = \frac{7,18}{\sqrt{}3} = 4,15$
Ved fasekompensering ungår man følgende:
-
Tap i generatorer, transformatorer og ledninger.
-
Galt forhold mellom drivmaskin (diesel) og generator.
Da vil ikke drivmaskin merker noe til reaktiv effekt. -
Galt forhold mellom drivmaskinens regulator og generators spenningsregulator.
-
Øket magnetiseringsytelse
Bruk av trefasemotorer som enfasemotorer
Bruk av trefasemotorer som enfasemotorer
I spesielle tilfeller kan normale trefasede motorer brukes som enfasemotorer.
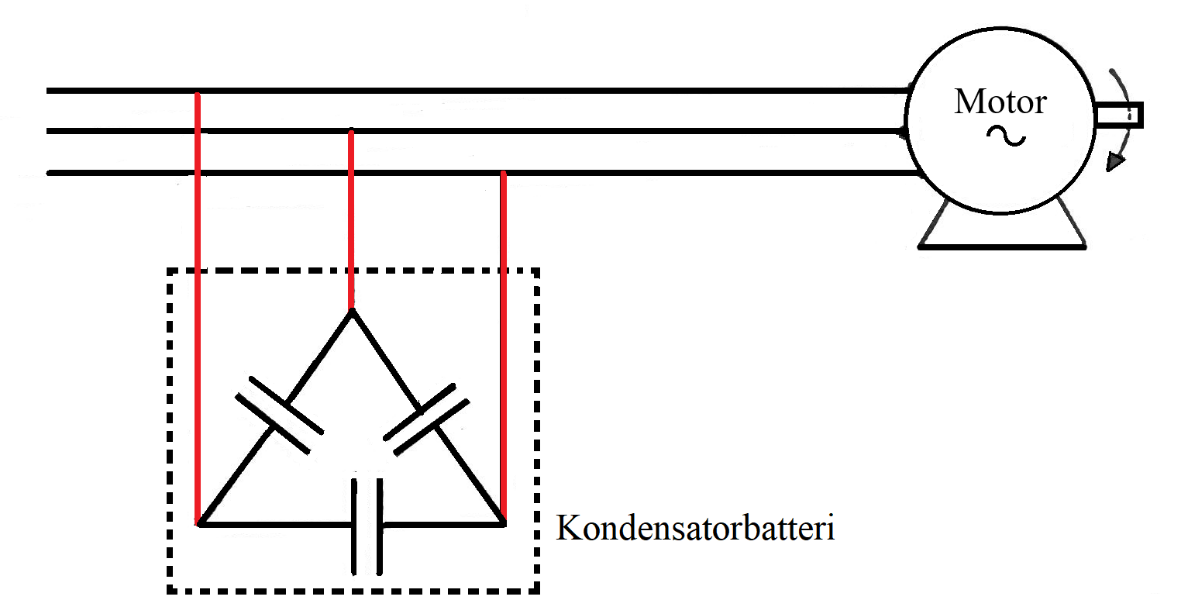
Figuren under viser noen eksempler på hvordan en trefaset motor kan brukes som enfasemotorer med kondensator.
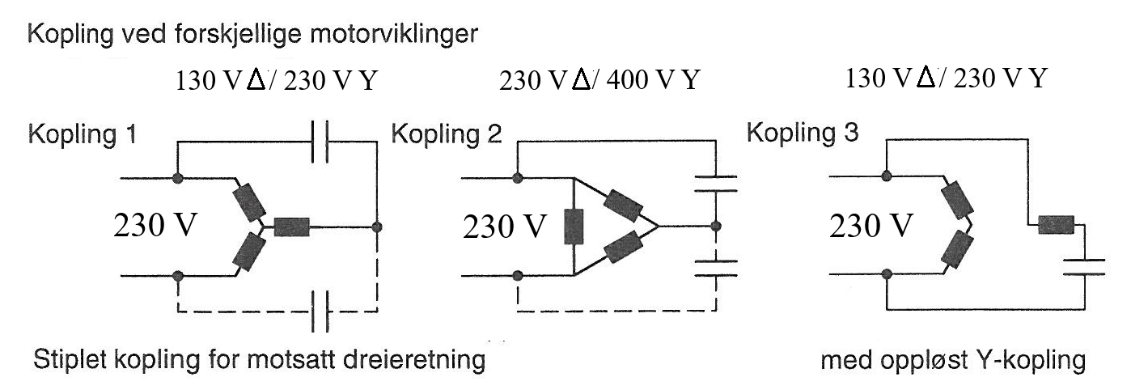
Noen eksempler på hvordan en trefaset motor kan brukes som enfasemotorer med kondensator.
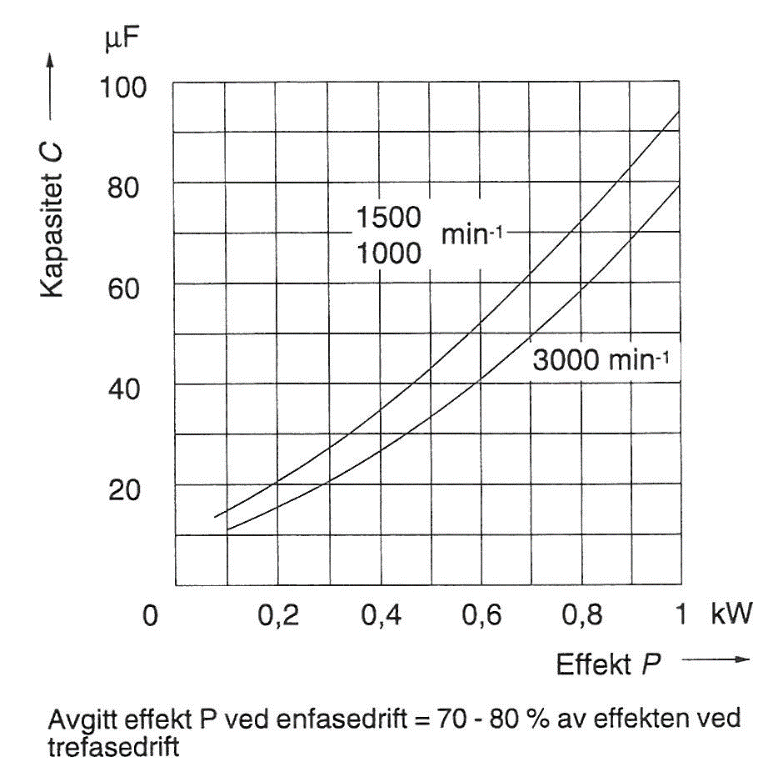
Den nødvendige kondensatorstørrelsen kan tas ut fra diagrammet på figur under. Motorytelsen er ca. 70–80 % av den trefasede ytelsen, og startmomentet er bare 25–35 % av det nominelle momentet ved enfaset drift.
Kondensatorkapasiteten gjelder for koblingene 1 og 2 på figur over ved 230 V. Her må kondensatoren legges ut for 1,15 x nettspenningen, i 230 V nett for minst 265 V.
Ved kopling 3 på figur over er den nødvendige kondensatorstørrelsen bare halvparten så stor som ved koplingene 1 og 2 ved samme motormerkeeffekt og samme nettspenning. Kondensatoren må utføres for en kontinuerlig driftsspenning på 1,35 x nettspenningen, i
230 V nett altså for 310 V.
Det er økonomisk forsvarlig å bruke trefasemotorer med kondensator for kontinuerlig drift til enfaset drift bare inntil enfase effekter opp til ca. 2 kW på grunn av kondensator- omkostningene.
For andre nettspenninger forandrer kondensatorstørrelsen seg i omvendt forhold til kvadratet av nettspenningene.
På grunn av det lave startmomentet og de dårlige egenskapene under startperioden er disse motorene bare egnet for drift av vifter og maskiner med avlastet start.
Trefase motor med kondensatorer slik at den blir enfase.

Resten av kapittelet er hentet fra LØNNE motor katalog, med tillatelse fra RUBIX
Trykk her for PDF av resten av kapittelet, PDF fra Lønne motorkatalot
