ARPA og «interface»
ARPA (Automatic Radar Plotting Aid)
Bakgrunn
Automatic Radar Plotting Aid
Etter flere kollisjoner mellom fartøy i Amerikanske farvann på midten av 70-tallet, ble det satt krav fra amerikanske myndigheter om bedre utrustning på skip som førte farlig last i deres farvann. Dette innebar blant annet at skip skulle ha to radaranlegg, hvor det ene skulle ha antikollisjonssystem (CAS). Videre la USA frem krav til IMO at dette måtte innføres internasjonalt på større fartøy, noe som endte i et regelverk med spesifikasjoner til ARPA, som var ferdig i 1979. I 1982 satte USA krav om at alle fartøy som førte farlig last, og fartøy som var over 10 000 bruttotonn, skulle ha ARPA. I 1984 kom det også krav fra IMO internasjonalt. (Kjerstad 2010)
ARPA skal redusere faren for kollisjon ved å:
- Lette arbeidsbelastningen på vakthavende offiser ved å automatisk innhente informasjon om plottede mål, slik at en kan operere med flere mål like bra som en kan ved et enkelt mål.
- Sørge for kontinuerlig, nøyaktig og hurtig evaluering av situasjonen.
Hvem skal ha ARPA
I henhold til SOLAS er det i dag krav til at alle fartøy over 10 000 bruttotonn skal ha ARPA. Men det er krav til at fartøy over 500 bruttotonn skal kunne følge mål automatisk, og om det er 3 000 BT skal fartøyet ha to automatiske målfølgere. (SOLAS Kapittel V/19)
I tabellen nedenfor er det laget en oversikt for å vise hvilke krav det er til radar- og ARPA-utstyr på skip ved forskjellige størrelser.
| Skipets størrelse | 9GHZ (X-Band) | 3GHZ (S-Band) | EPA | ATA | ARPA |
|---|---|---|---|---|---|
| > 300 bt + passasjerskip uavhengig av størrelse | X | X | |||
| > 500 bt | X | X | |||
| > 3 000 bt | X | X * | 2 stk | ||
| > 10 000 bt | X | X * | X ** | X |
* Kan også være godkjent med en 9 GHz radar istedenfor.
**Eventuelt en ARPA til istedenfor ATA.
Krav til ARPA
IMO stiller flere krav til ARPA, hvor disse skal være minimumsstandard for de som produserer ARPA-radarer. Flere produsenter av ARPA-radar tilbyr produkter som overgår disse kravene, samt at de kan ha bedre funksjonalitet enn kravene. Nedenfor er det satt opp noen av kravene som er satt til ARPA, fullstendig informasjon kan finnes i IMO resolution A.823 (19).
- Mål skal kunne plottes og følges automatisk og manuelt med en relativ fart opp til 100 knop.
- ARPA skal kunne plotte og følge 20 forskjellige mål uavhengig om det plottes automatisk eller manuelt, og innhente og oppdatere informasjon om disse målene.
- Mål som blir fulgt og oppdatert skal være klart merket på skjermen for operatøren
- Når nye mål blir plottet automatisk eller når systemet ikke følger et mål lenger skal det gis alarm, for å gjøre operatøren oppmerksom.
- Alarm om et mål kommer innenfor grenseverdiene operatøren har satt for CPA og TCPA
- Skal kunne gi informasjon om tidligere posisjon til plottet mål.
- Skal kunne opereres i «north-up»- og «course-Up»-orientering og relativ bevegelse.
- Kurs- og fartsinformasjon skal presenteres enten ved sann eller relativ vektor. Dette skal da indikeres hvilken vektor som er i bruk og om det er bevegelse over grunn eller igjennom vann som blir presentert. Vektorene skal også kunne justeres for tid.
- Når et mål er plottet og informasjonen er prosessert skal operatøren kunne få følgende informasjon om målet.
- Peiling og avstand til mål.
- CPA og TCPA til mål målet.
- Beregnet sann kurs og fart til målet.
- Systemet skal kunne simulere hvilken effekt en egenmanøver har på målene (Trial manoeuvre).
Fartstrekanten
For å gi forståelse for hvordan ARPA-radaren beregner CPA, TCPA og målets sanne kurs og fart, kan en se på hvordan en fartstrekant blir til og hva de tre sidene representerer. En slik trekant dannes av de faktorene vi har informasjon om, som er egen fart og kurs, samt målets relative bevegelse i forhold til oss over et gitt tidsintervall.
Som vi ser på fartstrekanten nedenfor, har vi tre linjer som representerer kurs og fart. Den røde linjen mellom punkt O og A, representerer den relative bevegelsen til et mål. Denne informasjonen får vi ved at en plotter et mål med et gitt tidsintervall og dermed kan finne den relative kursen og farten til dette målet. Denne informasjonen er nok til å beregne CPA og TCPA siden vi har avstanden til målet samt hvilken relativ bevegelse den har i forhold til oss.
Om vi legger til eget fartøys kurs og fart, som er representert ved den blå linja fra punkt W til punkt O (Way of Own vessel), vil en kunne trekke en linje mellom W og A (Way of Another vessel) og få informasjon om målets sanne kurs og fart (grønn linje). Denne metoden brukes om en skal gjøre en manuell relativ plotting i et plottediagram, men prinsippet vil kunne gi en ide om hvordan ARPA gjør sine beregninger.
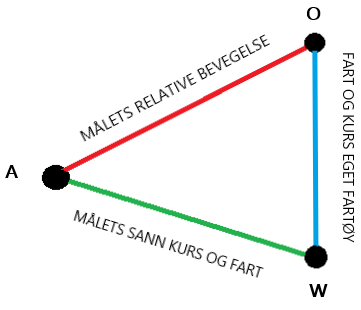
Figur 65: Fartstrekanten
Oppbygning
I dagens radarer vil ARPA vanligvis være integrert i hovedkortet og vil dermed være en del av radaren fra leverandør. Tidligere kunne det være at ARPA var en egen enhet eller et kort som ble koblet til radaren om bord. ARPA gjør at radaren blir i stand til å følge mål og dermed kunne gi operatøren informasjon for å forebygge sammenstøt. For å gjøre disse beregningene trenger radaren input fra kompass og logg som gir fart igjennom vann.
Tilkoblede instrumenter
Kompass
For at ARPA skal fungere er det nødvendig at det er tilkoblet et kompass for å vise skipets heading. Det mest vanlige er gyrokompass, men på noen fartøyer kan det være elektroniske kompass som er installert. Grunnen til at en må ha input fra et kompass er for en må vite hvilken retning skipet beveger seg for å gjøre beregninger.
Logg
ARPA skal kunne være både «sea-stabilized» og «groung-stabilized», som betyr at en skal kunne vise bevegelse igjennom vann og over grunn. Loggen som gir input til ARPA, skal kunne vise fart igjennom vann både forover og akterover. Vanligvis er dette enten en elektromagnetisk logg eller en akustisk logg som er låst til vannet. Utstyret som gir informasjon over grunn kan komme fra loggen om den er egnet for det, eller fra et elektronisk posisjonssystem, som vanligvis betyr GPS. Hvilken kilde en henter fartsinformasjon fra og om det er igjennom vann eller over grunn skal vises på skjermen for operatøren.
ARPA trenger informasjon om bevegelse igjennom vannet, noe den får ifra loggen. Grunnen til at en ønsker denne informasjonen er for å gjøre radarbildet med plottede mål mest mulig lik virkeligheten vi ser ut vinduet. Hadde vi fått informasjon i form av en vektor som gav fart og kurs over grunn, vil vi lett kunne mistolke dette mot det vi ser på radarbildet.
Når informasjonen kommer med kurs og fart igjennom vann, vil det skape et inntrykk av hvordan vi bør se de plottede målene, både ved skipets form på dagtid og ved lanterner i mørke eller nedsatt sikt. Dette kaller vi aspekt, og er vinkelen mellom siktelinjen til målet og målets bevegelse igjennom vann. Aspektet oppgis med en vinkel og farge, som indikerer vinkelen mellom vår siktelinje til målet og dets bevegelse igjennom vann, og fargen indikerer hvilken lanterne en kan forvente å se. Er vinkelen over 112,5 grader skal man da se akterlanternen, og vil gi en indikasjon på at en er innhentende
Eksempel
På figuren nedenfor ser vi at fartøy A får et fartøy inn på sin Styrbord side. Vinkelen mellom siktelinjen og målets bevegelse igjennom vann er 45° og en vil se den røde lanternen. Dermed blir aspektet i dette tilfellet Rød 45° og vil indikere at fartøy A skal holde av veien i henhold til Sjøveisreglene.
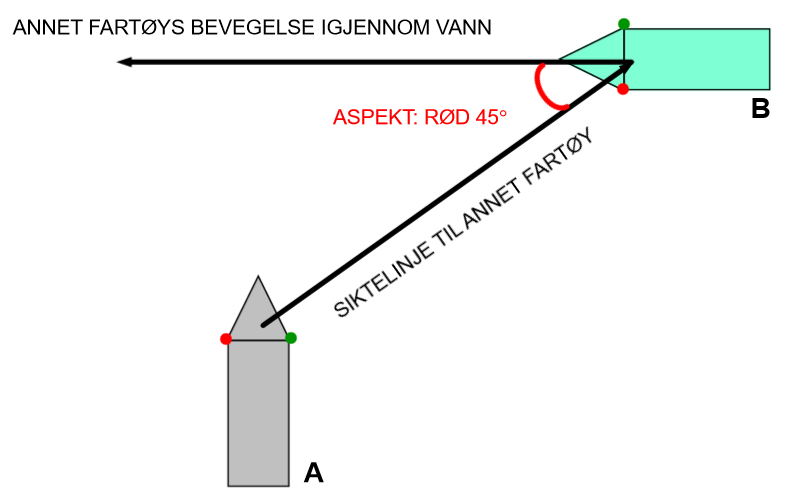
Figur 66: Aspekt
Funksjon/bruk av ARPA
Som nevnt er hensikten med ARPA å lette arbeidsmengden til operatøren og sørge for effektiv overvåkning for å forebygge kollisjon. For at ARPA skal fungere best mulig, er det nødvendig at radaren er innstilt etter forholdene. En riktig innstilt radar vil være med på å øke deteksjonsevnen og sørge for at ARPA får inn gode nok ekko til å beregne og følge målet. Feil innstilt radar, med for eksempel for lav gain eller mye anti clutter, kan føre til at en ikke får inn gode nok ekko, eller at en mister målet etter ARPA har startet målfølging.
Når et mål blir plottet vil en raskt få opp avstand og peiling til målet. Systemet trenger noe tid for å kunne presentere målet med vektor og dermed CPA og TCPA. Årsaken til dette er at ARPA bruker filter som skal hjelpe til for å gjøre plottingen så nøyaktig som mulig, og som trenger litt tid for å beregne informasjonen. Det tar vanligvis mellom 20–50 sekunder før en får den første informasjonen med vektor.
Automatisk radarplotting
Ved automatisk plotting vil ARPA plotte ekko som kommer innenfor gitte verdier/soner bestemt av operatøren. Disse sonene kan justeres etter hvilke forhold fartøyet seiler i, og er viktig for å oppnå best mulig plotting. Dersom en seiler inn langs kysten og ønsker å bruke automatisk plotting, kan det være nødvendig å snevre ned område, slik at ARPA ikke plotter land, staker, bøyer og andre faste objekter som ikke er relevant for navigeringen. Om fartøyet befinner seg i et område hvor det er mye trafikk, som for eksempel den engelske kanal, kan det være nødvendig å justere området ARPA skal utføre automatisk plotting. Grunnen til det er at mange av fartøyene i området vil ikke være relevante for navigeringen, og vil kunne gjøre radarskjermen uoversiktlig på grunn av den store mengden plottede mål.
På de neste sidene er det utsnitt fra radarskjermen som viser hvordan forskjellige situasjoner kan se ut for operatøren. Fremstillingen av de forskjellige situasjonene kan variere fra produsent til produsent, og vil kunne se noe annerledes ut. Alle illustrasjonene er tatt fra Polarisradar på Kongsberg K-Sim Navigation.

Figur 67 Automatisk plotting (guard zone)
Når en velger område som skal utføre automatisk plotting vil det være typisk at en bruker egendefinert guard zone, eller range rings/avstandsringer som er en gitt avstand fra fartøyet. Alt som kommer inn i disse områdene vil bli plottet, og vil etter kort tid kunne gi informasjon til operatøren om målets bevegelse. Når nye mål detekteres, skal operatøren gjøres oppmerksom på dette via advarsel og/eller alarm.
Figur 68 Plottet objekt som er under utregning
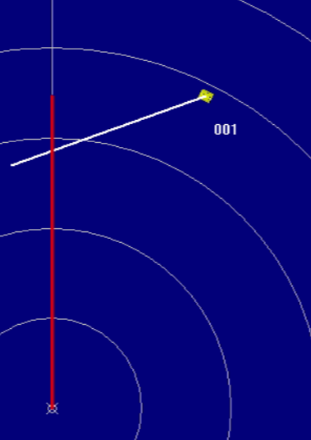
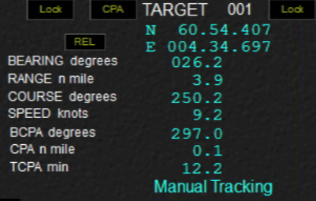
Figur 69 Plottet objekt med presentasjon
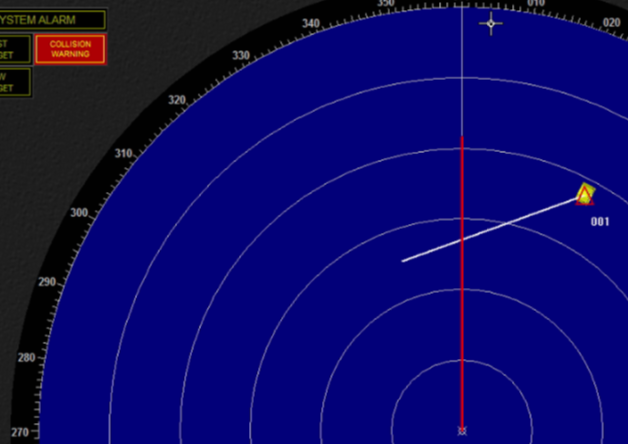
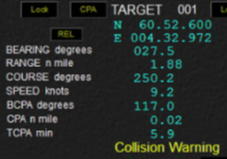
Figur 70 Kollisjonsvarsel
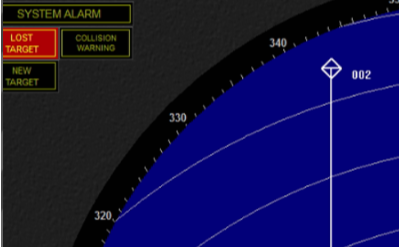
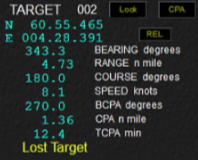
Figur 71 Lost target
En annen funksjon som kalles «footprint» kan også være tilgjengelig. Her må operatøren definere et område basert på avstand fra fartøyet forover og til sidene (styrbord/babord). Akterover kan en velge hvor stor sektor sonen skal være, med mulighet for å unngå at mål blir plottet aktenfor fartøyet.
Det finnes også muligheter hvor en kan definerer et gitt område i en retning og avstand fra skipet hvor ekko skal plottes automatisk.
Det er mulig at ARPA-radaren kan plotte automatisk i hele radarbildet. Dette vil ikke være en funksjon som gir stor nytteverdi for en navigatør på et seilende skip, men kan være nyttig til overvåkning ved for eksempel en VTS eller en plattform.
Manuell radarplotting
Om skipet skulle befinne seg i et område som nevnt over med stor trafikktetthet eller begrenset farvann, kan det være nyttig å gå over til at operatøren plotter målene manuelt. Dette krever at operatøren identifiserer hvilke mål vedkommende ønsker å få informasjon fra, og plotter dem fortløpende. Dette vil gi et radarbilde hvor operatøren bestemmer hva ARPA skal følge, men det betyr også at ARPA ikke følger noe mål før operatøren plotter dette manuelt. Når et mål er plottet vil ARPA følge målet til det blir kansellert av operatøren, eller om systemet mister målet.
Trial Manoeuvre
Trial Manoeuvre (eller prøvemanøver) er en funksjon som skal gjøre det mulig for operatøren å simulere effekten av en egenmanøver i forhold til plottede mål. Denne funksjonen er et IMO-krav og skal kunne legges inn både med og uten tidsforsinkelse på en eventuell manøver, uten at det skal gå ut over oppdatering og fremvisning av aktuelle mål.
Dersom trial manoeuvre er i bruk, skal dette tydelig indikeres med en rød T og teksten «trial» på skjermen og skal kunne kanselleres til enhver tid. Det er viktig å nevne at den informasjonen Trial manoeuvre-funksjonen viser, er med forbehold om at ditt plottede mål beholder kurs og fart og verdier som fart og svinginformasjon er korrekt lagt inn av operatøren.
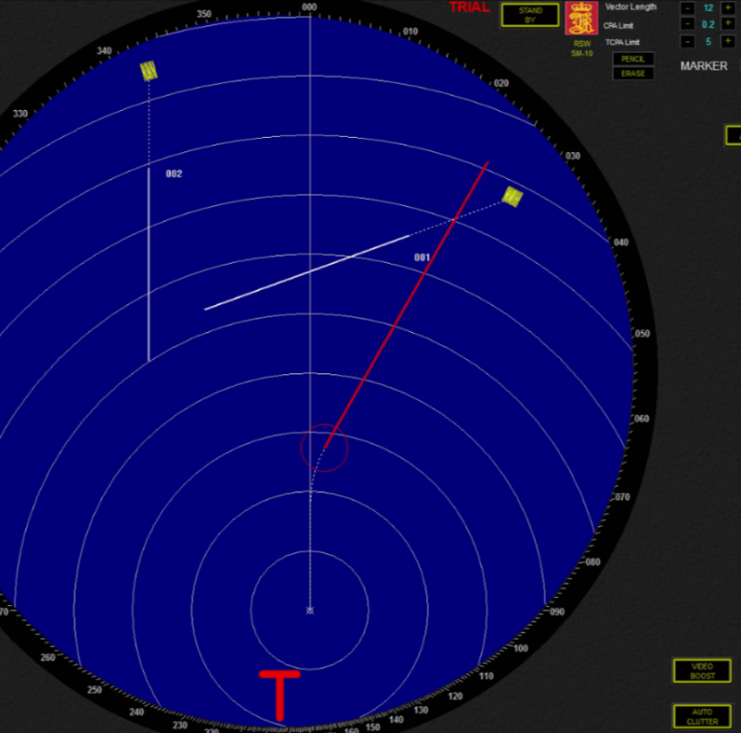
Figur 72 Trial maneuver fra Kongsberg K-sim Navigation.
Eksempel
Du er på kollisjonskurs med et annet fartøy som du har på din styrbord side, som du skal holde av veien for. Da kan du legge inn enten er kursendring, fartsendring eller en kombinasjon av disse i trial manoeuvre-funksjonen i ARPA. Denne funksjonen vil da simulere hvilken effekt denne manøveren vil ha ved å vise hvordan eget fartøy og plottede mål vil befinne seg etter gitt tidsintervall. Operatøren kan se hvordan CPA og TCPA vil endres i forhold til faktisk CPA og TCPA i øyeblikket, for å vurdere om manøver er korrekt og tilstrekkelig for å unngå nærsituasjon og fare for sammenstøt.
Orientering
ARPA skal kunne operere i «relative motion» både i «north up» og «Course up» (NU & CU). En skal også kunne operere i «true motion», og skal enkelt kunne velges av operatøren. Hvilken orientering og bevegelse en velger å bruke skal vises på skjermen, for eksempel som vi ser i figur 61.
Vektor
Når et mål er plottet og beregnet, målet bli presentert med en vektor fra målet. Vektoren vil kunne variere etter hvilken tidslengde operatøren har stilt inn, og om en bruker sann eller relativ vektor. Hvilken vektorinnstilling som brukes skal vises for operatøren.
Når en bruker sann vektor vil vektoren vise målets sanne kurs og fart (sea stabilized), og dermed i hvilken retning det beveger seg i. Sann vektor vil være det mest hensiktsmessige innstillingen å bruke da denne gir operatøren en indikasjon på hvordan en bør se fartøyet når en ser ut visuelt.
Dersom man bruker relativ vektor, vil en fjerne eget fartøys vektor, og dermed vise den relative bevegelsen til målet. Denne vektoren kan brukes til å avgjøre om det er fare for nærsituasjon eller sammenstøt.
Eksempel
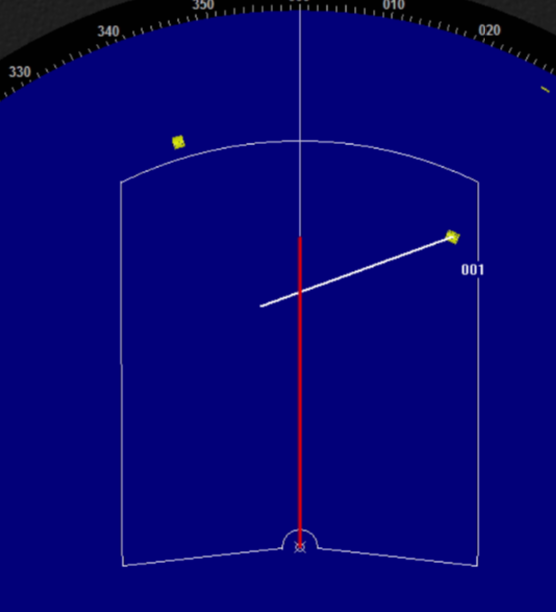
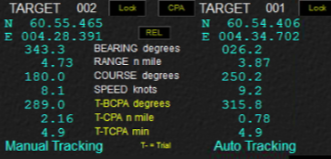
Nedenfor ser vi bilde fra radarskjermen hvor et mål er plottet, ferdigberegnet og vises ved vektor. Til venstre ser vi bilde hvor en har sann vektor, og dermed vises målets sanne bevegelse. Her ser vi også at eget fartøy har sann vektor representert ved den røde vektoren på skjermen.
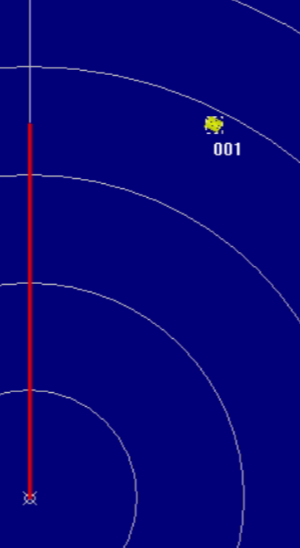
Til høyre ser vi samme mål i samme situasjon, men nå blir bildet presentert med relativ vektor. Legg merke til at vår egen vektor er tatt bort og målet vises nå med relativ bevegelse i forhold til oss. I dette tilfellet vil målets vektor har retning rett imot oss, som vil gi operatøren informasjon om at det er fare for sammenstøt, og vi må handle i henhold til sjøveisreglene.



Figur 73: Til venstre: Sann vektor. Til høyre: Relativ vektor.
Trails
Trails er en funksjon som kan aktiveres av operatøren, som vil gi en «etterglød» bak målet. Hensikten med denne funksjonen er å vise hvordan målet har bevegd seg innenfor tidsrammen operatøren har satt. Trails kan velges i både «true trails» og «relative trails», hvorpå førstnevnte vil indikere hvordan målet faktisk har bevegd seg, og «relative trails» vil indikere hvordan målet har bevegd seg i forhold til eget fartøy. «True trails» kan vises både som «sea stabilized» og «ground stabilized» og operatøren velger lengden på hvor lenge radaren skal tegne trails.
Fallgruver
Det er flere fallgruver ved ARPA-systemet som kan påvirke informasjonen operatøren får presentert. Det er viktig å ha informasjon om disse fallgruvene for å kunne lese informasjonen på best mulig måte og ta hensyn til dem for å unngå situasjoner hvor sammenstøt kan oppstå.
Systemfeil
Det kan være forhold i radar-/ARPA-systemet som kan føre til at målets informasjon er feil. Dette kan for eksempel være feil antenneposisjon på eget fartøy, feil input fra andre instrumenter og sensorer eller at det er en funksjonsfeil i selve radaren. Det er derfor viktig å gjennomføre jevnlig vedlikehold av systemet, samt utføre funksjonsjekk ved avgang og vaktbytter. Systemene har ofte innebygget selv-testing, som kan være med å avdekke eventuelle forhold som kan påvirke ytelsen.
Lav relativ fart
Dersom den relative farten mellom eget fartøy og plottede mål er liten, kan dette påvirke utregningene til ARPA. Grunnen er at fartstrekanten blir liten og vil lettere bli påvirket av feil i kurs og fart, og dermed i CPA- og TCPA-beregningene. Derfor bør en ta forbehold om dette om en kommer i en situasjon hvor en har liten relativ fart til et plottet mål.
Påvirkning fra egen manøver
Dersom en har et plottet mål og en selv gjør en manøver som kan påvirke både kurs og fart, vil dette kunne påvirke ARPA. Grunnen er at når en gjør endringer ved kurs og fart, vil systemet trenge noe tid for å beregne ny informasjon. I tillegg til at farts- og kurs-informasjonen som blir sendt til ARPA- systemet bruker litt tid på å stabilisere seg, vil informasjonen og vektorene en ser etter en kurs-/fartsendring trenge litt tid før operatøren bør stole for mye på dem.
Feil fartsinformasjon
Som nevnt tidligere skal ARPA ha informasjon om fart igjennom vannet, for å gi mest mulig korrekt oversikt over trafikkbildet en ser visuelt. Skulle en få fartsinformasjon med fart over grunn, vil dette gi feil fart på eget fartøy, og dermed gi feil informasjon om andre fartøy. Dette kan føre til at aspektet ikke er reelt, og en får feil tilnærming til den visuelle observasjonen av målet.
I noen tilfeller kan ARPA, med fart over grunn, gi informasjon om at en får en grønn aspektvinkel, som gir operatøren en indikasjon på at en ikke er på kollisjonskurs, men at det hadde vist rød aspektvinkel om ARPA hadde hatt fartsinformasjon igjennom vann. Dette kan være tilfelle om en er i områder hvor strømforholdene vil påvirke skipets bevegelse. Dess mindre farten er, jo større påvirkning vil strømmen få, og dermed kan forskjellene mellom fart igjennom vann og fart over grunn gi store utslag.
Eksempel
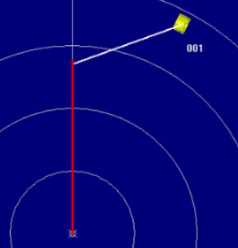
Om vi tar utgangspunkt i figuren nedenfor hvor vi seiler 000° i 12 knop, og plotter et fartøy i 035°. Strømmen setter i sørøstlig retning og det er mørkt. Vi får opp en vektor som viser at annet fartøy har en kurs på 240° med en fart på 11 knop. Denne vektoren er basert på at ARPA viser fart igjennom vann, og når en ser den svarte vektoren på figuren, skal forvente å se den røde sidelanternen når en ser ut, og dermed indikert at vi skal holde av veien for annet fartøy.
Hadde ARPA fått fartsinformasjon over grunn, ville farten inn i beregningene blitt feil. Dette ville ført til at vektorene ville blitt vist annerledes og en ville ha forventet å se grønn sidelanterne på annet fartøy, som ville indikert at annet fartøy skal holde av veien for deg. Dette er indikert med grå linje på figur.
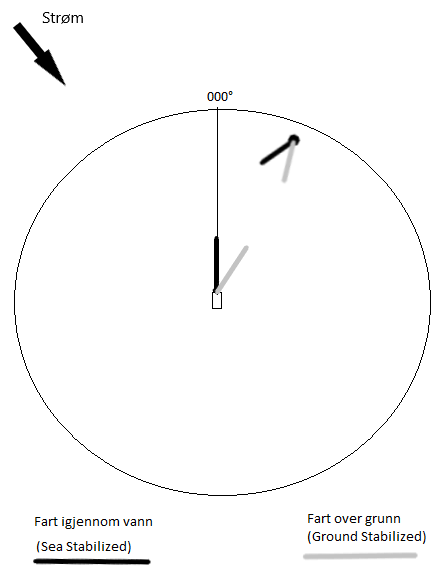
Figur 74: Forskjell på fartsinformasjonen inn i ARPA kan gi forskjellig visning for operatøren.
Feil i kursinformasjon
Som nevnt skal ARPA være tilkoblet en kompass for å supplere med egen kurs, vanligvis et gyrokompass. Gyrokompasset kan ha feilvisning, og feilen kan endre seg basert på hvilken kurs og fart skipet holder, samt hvilken breddegrad en opererer på. Noen gyrokompass har automatisk korrigering for farts- og breddefeil, og det vil være nødvendig for operatøren å ha informasjon om dette for å forvisse seg om at kursinformasjonen er korrekt. Et gyrokompass kan få relativt store feil dersom det ikke blir korrigert, og denne feilen vil da også gi utslag i ARPA.
Target swop
Dersom to mål kommer nær hverandre kan det hende at de smelter sammen som følge av at radaren oppfatter de som ett mål. Dette kan føre til at en da mister målfølging på det ene målet, og operatøren må plotte ekkoet på nytt for å få målfølging igjen med mindre en opererer med automatisk plotting, og ekkoet er innenfor valgt område.
Regelverk
Her skal vi se litt på hva regelverkene sier om bruk av ARPA. Selv om de ikke nødvendigvis sier noe konkret om bruk eller krav til ARPA, vil det kunne være forhold som dekker dette i de forskjellige regelverkene.
Sjøveisreglene
Regel 5 – Utkikk
Denne regelen sier at en skal alltid holde ordentlig utkikk ved syn og hørsel, men også med alle tilgjengelige midler som kan brukes under de omstendigheter og forhold skipet navigerer i, for å kunne foreta en fullstendig vurdering av situasjonen og faren for sammenstøt. Dette vil da si at dersom en er på fartøy hvor det er krav til plotteverktøy, som for eksempel ARPA, skal en bruke det aktivt for å få fullstendig oversikt over situasjonen og dermed kunne gjøre en fullstendig vurdering av situasjonen og om det er fare for sammenstøt.
Regel 6 – Sikker fart
Regel 6 sier at fartøy som bruker radar skal ta hensyn til radarens karakteristikk, effektivitet og begrensning. Samtidig skal en ta hensyn til antall, posisjon og bevegelse av fartøy som observeres ved radar. Dette vil da bety at ARPA og plotting av andre fartøyer vil være med når en skal vurdere og sette hva som er sikker fart for ditt fartøy under de rådende omstendigheter og forhold.
Regel 7 – Fare for sammenstøt
Denne regelen sier at en skal bruke alle tilgjengelige midler som er brukbare under de rådende omstendigheter for å avgjøre om det er fare for sammenstøt. Noe som betyr at en skal bruke radar/ARPA dersom en har dette tilgjengelig om bord. Videre sier regelen at dersom en bruker radarutstyr, skal dette brukes riktig, hvorpå en skal søke på lang avstand for å få tidlig varsling om det er fare for sammenstøt. Dette innebærer at en også skal plotte andre fartøyer når disse er observert, slik at en kan vurdere om det vil være fare for sammenstøt. Men skal heller ikke vurdere situasjonen ut ifra sparsomme opplysninger, da spesielt ikke sparsomme radaropplysninger. Er man i noen som helst tvil om det er fare for sammenstøt eller ikke, skal man da handle som at det er fare for sammenstøt.
Regel 19 – Fartøy som ikke er i sikte av hverandre
Regel 19 omhandler fartøy som ikke er i sikte av hverandre, og som navigerer under nedsatt sikt. Denne regelen sier at man skal avpasse farten etter omstendighetene og nedsatte siktforhold, samt ta nøye hensyn til omstendighetene og nedsatte siktforhold når en skal etterkomme reglene i avsnitt 1, hvor blant andre de reglene over er en del av.
Regelen sier også at dersom en oppdager et annet fartøy, bare ved hjelp av radar, skal en avgjøre om nærsituasjon kan utvikle seg, eller om det kan være fare for sammenstøt. Noe som betyr at en kan og skal bruke et eventuelt plotteverktøy som for eksempel ARPA for å vurdere faren for sammenstøt, eller om en slik situasjon kan utvikle seg.
Brovaktforskriften
Brovaktforskriften henviser til at når en benytter radar i navigeringen skal den vakthavende offiseren oppfylle gjeldende bestemmelser for bruk av radar i sjøveisreglene. Dette vil da henvise til sjøveisreglene som er nevnt over.
Forskriften sier også at: når radaren er i bruk, skal den vakthavende offiseren alltid velge en passende radarskala og følge nøye med på skjermen, og offiseren skal sikre at plotting eller systematisk analyse blir påbegynt i god tid.
Brovaktforskriften sier da at operatøren skal plotte andre fartøyer og vurdere situasjonen i god tid, slik at en får oversikt over situasjonen.
Denne forskriften henviser også til at en vakthavende dekksoffiser skal være kvalifisert i samsvar med STCW-konvensjonens tabell/ii og tabell/vii. Her er det satt krav til at vakthavende offiser som skal utføre brovakt på skip med ARPA, skal ha opplæring og bedømmelse i ARPA, for å kunne opprettholde sikker navigering og vurdere faren for sammenstøt.
Illustrasjoner
Under er det utsnitt fra radarskjermen om hvordan forskjellige situasjoner kan se ut for operatøren. Fremstillingen av de forskjellige situasjonene kan variere fra produsent til produsent, og vil kunne se noe annerledes ut. Alle illustrasjonene er tatt fra Polarisradar på Kongsberg K-Sim Navigation.
Manuell plotting
For å få forståelse for hvordan ARPA beregner CPA, TCPA og annet fartøys bevegelse, kan en utføre manuell plotting i et plottediagram. Om man utfører relativ plotting vil en ta utgangspunkt i hvordan målet beveger seg i forhold til eget fartøy, og dermed kan en beregne CPA/TCPA. Legger en til eget fartøys bevegelse vil en kunne finne annet fartøys kurs og fart ved å ferdigstille fartstrekanten som nevnt tidligere.
Når man utfører manuell plotting er det greit å ta utgangspunkt i bevegelse over 6 minutters intervall, da dette er 1/10 time, noe som gjør det enklere å beregne annet fartøys relative og sanne bevegelse.
Eksempel
Kl. 1500 plottes et mål i 050° og avstand 7,0 nm (punkt O).
Kl. 1506 plottes samme mål 049° og avstand 6,0 nm (punkt A).
Eget fartøy går i 000° og holder en fart på 10 knop.
En plotter først peiling og avstand til målet 1500 og kaller dette punktet O. Deretter følger en målet i 6 minutter og plotter det på nytt 1506, og kaller punktet A. Dette representerer hvor mye målet har flyttet seg i forhold til oss på 6 minutter, altså den relative bevegelsen til målet.
Deretter kan vi trekke en linje fra første punktet (O) og igjennom det andre (A) og forbi eget fartøy som vil være i senter av plottediagrammet. Linja kan vi bruke til å finne relativ kurs og fart, samt CPA og TCPA til målet. Kursen finner vi ved å parallellforskyve linja til senter og lese av kursen i gradskiven som er rundt plottediagrammet. Farten finner vi ved å måle avstanden mellom punktene (O & A) og måle fra senter og ut på avstandsprikkene. Denne avstanden er den avstanden vil være den relative bevegelsen på målet i løpet av 6 minutter, og vi må gange med 10 for å finne den relative farten.
Når vi har funnet disse verdiene kan vi finne CPA og TCPA ved at trekker en linje mellom senter og i en retning som er 90° av kursen til den relative kursen til målet. Dette punktet vil da være det punktet hvor fartøyene vil være nærmest hverandre, og vi måler avstanden fra senter og ut til skjæringspunktet på linja og måler CPA (1,1 nm)
Når vi har definert CPA kan en beregne TCPA ved å måle avstanden mellom punkt A og CPA. Denne avstanden vi får her må vi dele på den relative farten, som gir tiden det tar før fartøyene er på det nærmeste punktet.
Når en har fått definert CPA/TCPA kan en finne målets sanne kurs og fart ved å legge til egen kurs og fart i løpet av 6 minutters seilas. Dersom en trekker en linje igjennom det første plottet (O) og motsatt av egen kurs, og måler opp distansen skipet har seilt, som i dette tilfellet er 1 nm, kan en sette ut punkt W. Da har en to sider og 3 punkter i fartstrekanten, og en kan trekke en linje mellom W og A (Way of another Vessel) som representerer sann kurs og fart til målet. En må da parallellforskyve linja til senter og lese av i gradskiven og måle avstanden. Siden dette er skipets sanne bevegelse i løpet av 6 minutter, må vi gange med 10 for å få sann fart i knop.
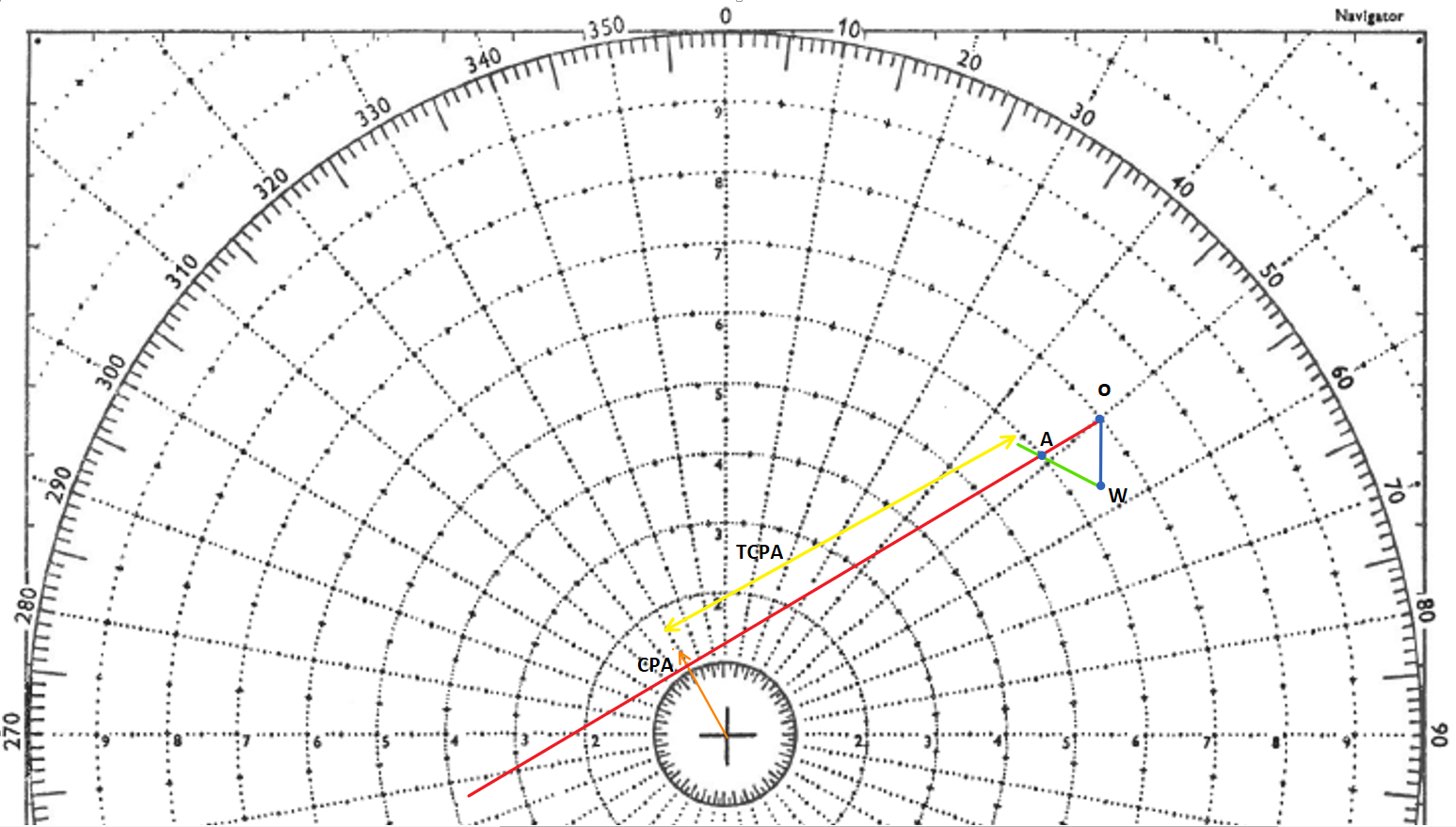
Figur 75: Manuell plotting
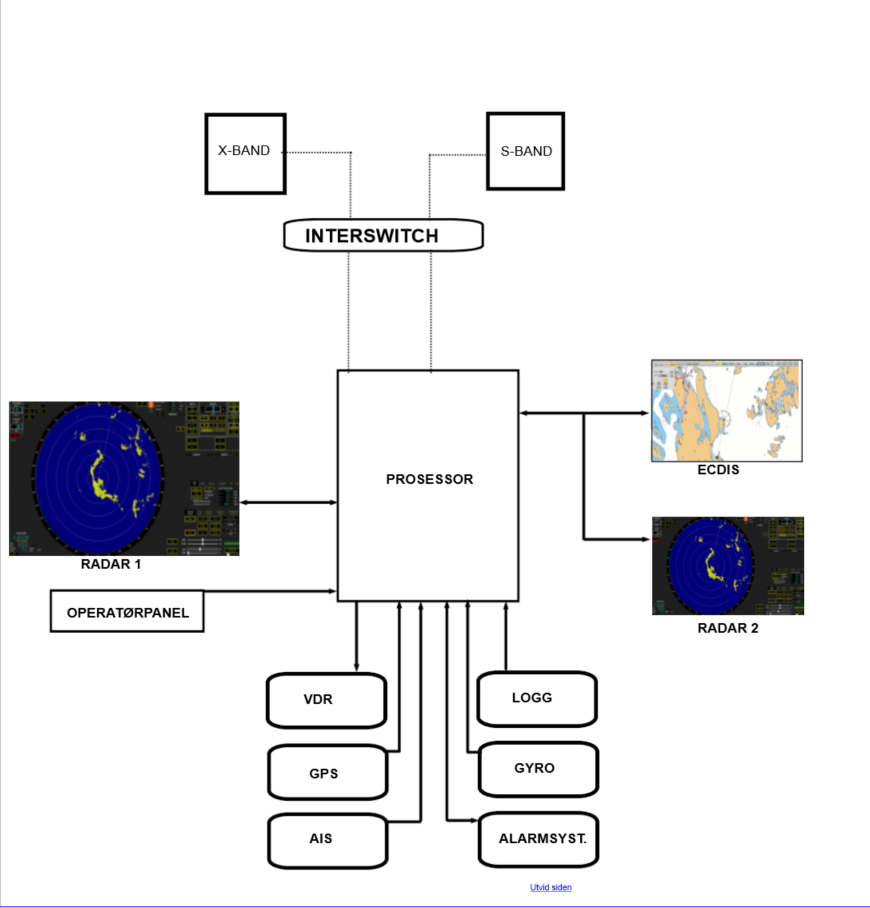
Tilkobling (interface)
En radar skal for å etterkomme IMO-kravene være kapabel til å motta input fra andre navigasjonsinstrumenter. Disse instrumentene er kompass-, farts- og distansesensor, elektronisk posisjonssystem, AIS eller andre sensorer som kan gi lignende og tilsvarende informasjon. Vi skal her gi en kort beskrivelse av hvilke instrumenter og sensorer radaren skal være tilkoblet og hvilken funksjon disse har i radarsammenheng.
Kompass
For at radaren skal kunne brukes i «North Up» eller «Course Up» orientering, må det være tilkoblet et kompass. Dette betyr stort sett gyrokompass, men kan i noen tilfeller være en annen sensor som gir tilsvarende informasjon om skipets heading. Skal en operere i «true motion» trengs det informasjon om sann kurs, som kommer fra denne sensoren. Er radaren utstyrt med ARPA brukes også heading til å beregne informasjon om CPA/TCPA slik at operatøren kan avgjøre om det er fare for sammenstøt eller nærsituasjon.
Farts- og distansesensor
Radaren skal kunne brukes i både fart igjennom vann og fart over grunn. Denne informasjonen kommer som oftest fra en elektromagnetisk logg eller en akustisk logg. Sistnevnte kan låses til bunn eller til vannsjiktet og vil kunne brukes i begge sammenhenger. Alternativt kan en få informasjon om fart over grunn fra en posisjonssensor, som GPS. Fart igjennom vannet brukes i sammenheng med ARPA og relativ bevegelse, mens fart over grunn brukes blant annet i kystfarvann hvor det er strøm og avdrift. Fart over grunn vil gi en bedre indikasjon av bevegelsen til skipet langs farleden.
Elektronisk posisjonssensor
Vanligvis vil radaren få denne informasjonen ved å være tilkoblet en GPS eller annet tilsvarende navigasjonssatellittsystem. Informasjon om posisjon brukes til å gi posisjon på radarskjermen ved for eksempel pekeren. Denne informasjonen brukes også sammen med AIS informasjon en eventuelt legger inn på radaren. Posisjonssensor kan også brukes til å gi informasjon om fart og kurs over grunn.
ECDIS
På fartøy som fører ECDIS er det i dag normalt at den er koblet sammen med radaren om bord. Dette gir operatøren muligheten til å overføre plottedata fra radaren til ECDIS og gi god informasjon om trafikkbildet i kartmaskinen. Dette gjelder spesielt mot mål som ikke har AIS og som ikke vises på ECDIS ved hjelp av denne. Ved flere anlegg kan en også overføre video fra radaren inn på ECDIS- skjermen. Dette vil kunne gi operatøren et godt innblikk i hvordan radarbildet passer sammen med kartet og en kan vurdere om en har riktig kurs- og posisjonsinformasjon.
Dersom en har installert en kartradar om bord, gir dette operatøren til å bruke et kartgrunnlag på radarskjermen og at radarbildet blir tegnet over det. Dette kan gi informasjon om kurs- og posisjonsinformasjonen er korrekt og om radarbildet blir tegnet i henhold til kartet. Utfordringen kan være at radarbildet ikke blir like «rent» og at viktig informasjon kan forsvinne i mengden på skjermen.
AIS
På radaren er det normalt at operatøren har mulighet til å aktivere AIS-data på radarskjermen. Det gjør at AIS-mål vises på radarskjermen med samme symbolikk som de vises på ECDIS-skjermen. Dette kan brukes sammen med ARPA for å vurdere trafikkbildet og sikre seilasen. Viktig å merke seg at AIS bruker fart over grunn, mens ARPA bruker fart igjennom vann, og det kan være store avvik, spesielt i områder med mye strøm.
For at en skal kunne vise AIS data på radarskjermen må en være tilkoblet en posisjonssensor.
VDR
VDR er tilkoblet radar på en slik måte at den mottar informasjon og kan gjengi en kopi av radarskjermen som var presentert når opptaket ble gjennomført.
Alarmsystem
Lasteskip over 150 bruttotonn og alle passasjerskip skal ha alarmsystem (BNWAS) installert om bord. Dette vil blant annet være koblet opp mot radaranlegget om bord og vil gi alarm dersom operatøren ikke kvitterer for alarmen på radarsystemet innen et gitt tidsrom. Denne skal være aktivert når skipet er underveis.
Andre tilkoblinger
Flere produsenter gir mulighet til flere tilkoblingsmuligheter utover det som er krav fra IMO. Dette kan være ekkolodd, vindmåler og andre instrumenter en har om bord. Ved å koble sammen flere instrumenter kan en skape et mer helhetlig bilde av situasjonen en befinner seg i. Samtidig bør en være kritisk til om for mye input gjør at viktig informasjon som for eksempel et svakt ekko forsvinner i mengden, og kan skape farlige situasjoner.
